Разновидность подъемных механизмов для верхних шкафчиков кухонь и гостиных.
Современную мебель нельзя себе представить без подъемных механизмов. Этот вид мебельной фурнитуры делает открывание верхних тумб в гостиной или верхних шкафчиков на кухне удобным и комфортным. В нашем производстве мы используем весь спектр подъемных механизмов: от газовых (газлифтов) до сложных со встроенным доводчиком и системой электромеханического открывания.
Представляем наиболее популярные виды подъемных механизмов, которые мебельная студия «БестМодерн» предлагает своим заказчикам. Как работают некоторые из них можно посмотреть в шоу-руме при производстве. Мы используем подъемные механизмы Aventos (Blum), LiftUp (Hettich), Twins (Firmax).
1) Складные подъемные механизмы — предназначены для складных фасадов для кухонь и гостиных. Фасады могут быть из дерева, алюминиевого профиля, ДСП, МДФ разного размера и веса.
Этот механизм может быть укомплектован такими технологиями движения, как доводчики и электромеханический метод открывания Push-to-Open.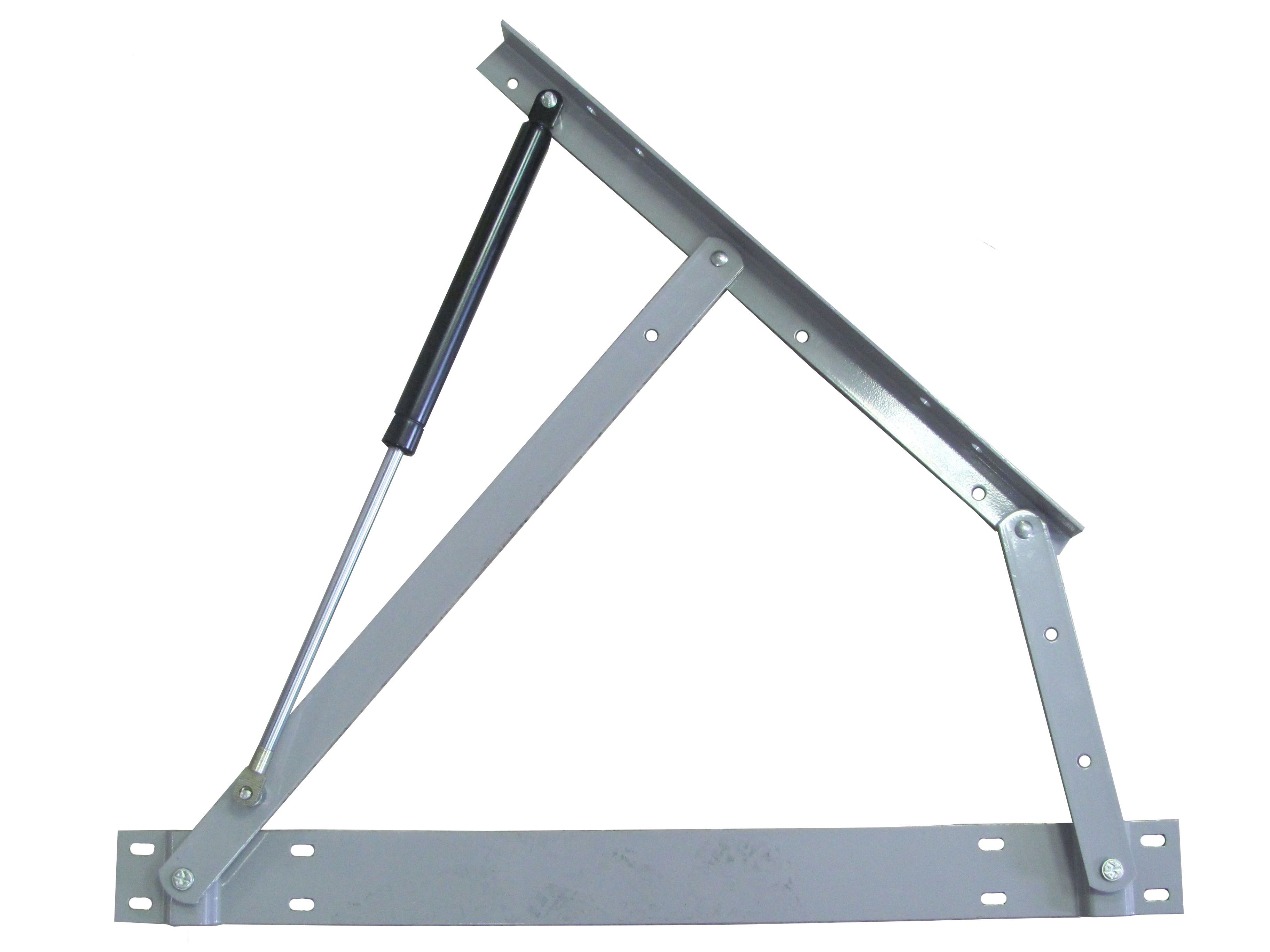
2) Вертикальные подъемные механизмы — подходят для верхних шкафчиков кухни или гостиной, обеспечивая полный доступ к содержимому. Рекомендуется для высоких шкафов со строенными электроприборами. По желанию комплектуется электромеханическим способом открывания нажать-открыть Servo-Drive (Blum), что очень удобно при высоких шкафах, когда не достать до ручки.
3) Откидной подъемный механизм — используется для больших цельных фасадов из дерева, алюминиевого профиля, МДФ. Фасад поднимается над шкафом и не мешает передвижению по кухне, его можно остановить в любом положении.
Демпферная система амортизации обеспечивает бесшумное закрывание.
4) Поворотный подъемный механизм — подходит для верхних шкафов с невысоким корпусом. Удобен для встраиваемых конструкций (над холодильником, например), так как не требует много места сверху.
Комплектуется доводчиками и механизмами Tip-On и Servo-Drive.
10.6: Проектирование подъемных механизмов
В этом блоке приводится описание большого количества подъемных механизмов, но какой из них наиболее является наиболее эффективным для проекта именно вашего робота?
Существует несколько ключевых моментов, которые проектировщики должны учитывать при проектировании подъемного механизма.
Требуемая высоту подъема:
Первым и наиболее важным моментом является требуемая высота подъема. На какой высоте робот будет подбирать объект? На какую высоту робот должен будет поднять объект? Существует ли несколько вариантов высоты ворот? Какой механизм может справиться с несколькими вариантами высоты?
Еще одним важным моментом для проектировщика является изменение ориентации объекта, если требуется. Как будет ориентирован объект после того, как его подберет робот? Как будет ориентирован объект после того, как робот его сбросит? Для разных вариантов высоты, должна ли соответственно изменяться ориентация объекта? Для изменения ориентации объекта может быть использован подъемный механизм. Некоторые подъемные механизмы более эффективны, чем другие, для решения задачи изменения ориентации объекта. Например, если необходимо сохранить ориентацию объекта неизменной от момента, когда робот подобрал его, до момента, когда робот сбросил его, уместно включить в проект линейный подъемник, а не вращающееся соединение.
Некоторые подъемные механизмы более эффективны, чем другие, для решения задачи изменения ориентации объекта. Например, если необходимо сохранить ориентацию объекта неизменной от момента, когда робот подобрал его, до момента, когда робот сбросил его, уместно включить в проект линейный подъемник, а не вращающееся соединение.
Стартовая конфигурация и другие ограничения размеров:
На момент начала матча соревновательные роботы VEX должны иметь определенные стартовые размеры, устанавливаемые правилами игры для каждого сезона. Условие стартовых размеров ограничивает возможности использования подъемных механизмов. Например, рука с одним подвижным соединением, на момент начала матча находящаяся в пределах размерного ящика 18 х 18 х 18 дюймов, не сможет достичь высоты, равной четырем футам. Для выполнения данной задачи необходимо использовать руку с несколькими соединениями. К проекту соревновательного робота зачастую применяются и другие ограничения размеров.
Некоторые подъемные механизмы занимают больше места, чем другие. Если на роботе установлен большой объектный манипулятор типа «приемник», и он занимает практически весь объем стартовой конфигурации робота, проектировщику придется найти более компактный подъемный механизм, чтобы он смог разместиться в пределах оставшегося пространства. Некоторые подъемные механизмы более просты в установке, чем другие.
Сложность:
В некоторых случаях допускается использование нескольких подъемных механизмов. Тем не менее, все механизмы различаются по сложности конструкции. Наиболее простой механизм, способный выполнить поставленные проектные задачи, всегда является удачным выбором. Оптимизация и сокращение количества проектных задач также может стать эффективным решением. Например, если простой механизм «почти полностью может справиться» с поставленными задачами, и при этом полноценная реализация всего объема проектных задач потребует ЗНАЧИТЕЛЬНОГО усложнения конструкции этого механизма, в этом случае, вероятно, стоит сделать выбор в пользу более простого решения. В конструкцию простых механизмов входит меньшее количество подвижных частей, при этом они более прочные, меньше подвержены сбоям и, в связи с этим, более эффективны.
Тем не менее, все механизмы различаются по сложности конструкции. Наиболее простой механизм, способный выполнить поставленные проектные задачи, всегда является удачным выбором. Оптимизация и сокращение количества проектных задач также может стать эффективным решением. Например, если простой механизм «почти полностью может справиться» с поставленными задачами, и при этом полноценная реализация всего объема проектных задач потребует ЗНАЧИТЕЛЬНОГО усложнения конструкции этого механизма, в этом случае, вероятно, стоит сделать выбор в пользу более простого решения. В конструкцию простых механизмов входит меньшее количество подвижных частей, при этом они более прочные, меньше подвержены сбоям и, в связи с этим, более эффективны.
Требования к количеству электромоторов:
Количество электромоторов и других исполнительных механизмов, разрешенных к применению в конструкции соревновательных роботов, ограничено. Проектировщики должны точно знать, какого количества электромоторов требует тот или иной вариант подъемного механизма.
Подъемный механизм FREE FOLD
КатегорияВсе Акции и спецпредложения Барные стулья Все для Кухни» Вытяжки кухонные»» Комплектующие к кухонным вытяжкам» Корзины, посудосушители, колонны»» Корзины, посудосушители в верхний шкаф»» Корзины, посудосушители в нижний шкаф»» Корзины, посудосушители в угловой шкаф»» Выдвижные колонны» Лотки, вкладыши» Мебельные щиты»» Дизайн-панели Albico»» Мебельные щиты Альбико»» Мебельные щиты Скиф»» Мебельные щиты Союз»» Мебельные щиты Слотекс»» Комплектующие к мебельным щитам» Мойки кухонные»» Мойки GranFest»» Мойки GranFest QUARZ»» Мойки Ewigstein»» Мойки ЕМАР»» Мойки МаксСтоун»» Мойки универсального монтажа»» Распродажа»» Комплектующие к мойкам» Мусоросборники/Гигиенические покрытия» Подставки под горячее» Плинтус кухонный»» Плинтус кухонный KORNER LB37 (Польша)»»» Комплектующие к плинтусу LB-37»» Плинтус кухонный KORNER LB40 (Польша)»» Плинтус кухонный REHAU — 118 (Германия)»»» Комплектующие к плинтусу Рехай 118»» Плинтус кухонный REHAU PERFETTO LINE (Германия)»»» Комплектующие к плинтусу Перфетто-Лайн»» Плинтус кухонный ТЕРМОПЛАСТ АР-120 (Польша)»»» Комплектующие к плинтусу АР120»» Плинтус кухонный ТЕРМОПЛАСТ АР-740/850 (Польша)»»» Комплектующие к плинтусу АР740»» Гибкий плинтус ТЕРМОПЛАСТ АР-632 (Польша)»» Плинтус кухонный ПЛАТО (Россия)»»» Комплектующие к плинтусу Плато»» Плинтус кухонный под вставку» Рейлинги и декоративные элементы»» хром»» бронза»» Рейлинги и декоративные элементы STEELWOOD»» Рейлинговая система B-Planum» Столы и подстолья» Стулья, табуреты и каркасы» Смесители кухонные»» Смесители GranFest»» Смесители Ewigstein»» Смесители Paulmark» Система барных стоек» Столешницы»» Столешницы СКИФ»»» Действующая коллекция пластиков СКИФ»»» Комплектующие к столешницам Скиф»» Столешницы СОЮЗ»»» Комплектующие к столешницам Союз»» Столешницы СЛОТЕКС»»» Комплектующие к столешницам Слотекс»» Столешницы ALBICO»»» Комплектующие к столешницам Альбико»» Столешницы КЕДР»» Герметик для столешниц» Термозащитный профиль» Цоколь кухонный Готовая офисная мебель» Столы, шкафы, тумбы, сталлажи» Офисные диваны и кресла для зон ожидания» Кресла, стулья»» Кресла для руководителя»» Кресла для персонала»» Детские кресла»» Стулья для посетителей»» Комплектующие Готовые изделия Дополнительные услуги» Заточка дисковых пил» Изготовление дверей для шкафов купе» Раскрой прямолинейный» Раскрой сложный (закругленная форма, диагональный рез)» Нанесение клея» Облицовка простая» Облицовка кромкой сложная (закругленная форма)» Покраска металла» Прочие услуги» Раскрой зеркала, стекла» Сращивание» Услуги по сборке фасада» Упаковка» УФ печать Зеркала и стекла» Стекла и зеркала простые»» Варианты минимальных размеров простых стекол и зеркал» Стекло крашеное» Стекла с рисунком» Зеркала с рисунком» Зеркала с подсветкой» Плитка зеркальная» Стекло с УФ-Печатью Изделия из камня Инструменты, Упаковочные материалы» Расходные материалы» Упаковочные материалы» Инструмент»» Пилы»» Подшипники»» Сверла»» Фрезы»» Мебельный инструмент Картины Альбико Каркасно-модульная система «Лофт комплект» Карнизы для штор Кухонные модули» Готовые кухонные модули в верхнюю базу» Готовые кухонные модули в нижнюю базу» Готовый кухонный колонный шкаф Клей-расплав Кровати Кромка» ПВХ кромка» Меламиновая кромка» Кромка ПВХ глянец» Кант накладной П-образный Маски медицинские Матрасы» Чехлы водонепроницаемые Ортопедические основания для кровати Освещение» Светильники» Комплектующие к светильникам» Светодиодные ленты Перфорированные Панели ХДФ Плитные материалы» ЛДСП Lamarty»» Классификация ДСП к кромке»» Рекомендуемые сочетания декоров Lamarty»» Артикулы кромок ПВХ к ЛДСП Lamarty»» Таблица соответствия Воск/Штрих/Маркер к ЛДСП Ламарти»» Сертификаты» ДСП шлифованная» ЛХДФ/ХДФ» ДВП» МДФ» Фанера берёзовая Панели и профили МДФ» Панели МДФ» Профили МДФ» Сопутствующие товары Система алюминиевых, деревянных и пластиковых профилей» Ручки-купе» Торцевой профиль» Профиль «Secret» (Фасад без ручек)» Профиль для торгового оборудования» Полка-светильник» Рамы и опоры корпусной мебели» Подвесная система для межкомнатных дверей» Распашная система» Система для складных дверей» Система для деревянных дверей» Система для раздвижных дверей»» Декоративная система для раздвижных дверей»» Система Cruiser для раздвижных дверей»» Система FAST 50кг для раздвижных дверей»» Шкафы-купе «Росла»»» Шкафы-купе LK «Росла (облегченный)»»» Шкаф-купе «Росла Sprint» (ДСП 16 мм)»» Шкафы-купе «STERN»»» Шкаф-купе «Алвид»»» Шкаф купе «Гратис»»» Профиль KD однополозный»» Шкаф-купе в минималистском стиле»» Шкаф купе «Безрамный» Система перил Joker Складная (походная) мебель Средства для реставрации мебели и ЛДСП Фасады» Фасады крашенные мдф» Фасады из алюминиевого профиля» Фасады из панелей AGT» Фасады фабрики «Кедр»» Фасады фабрики «Fabriche» Фурнитура для корпусной мебели» Вешалки напольные для одежды» Заглушки для профильных труб» Заглушки для проводов в столешницу» Замки» Защелки мебельные, магниты, амортизаторы» Зеркалодержатели, стеклодержатели» Комплектующие для шкафов купе и гардеробных комнат»» Лифт-пантограф для хранения одежды»» Сетчатые корзины и полки для белья» Крючки мебельные» Навесы для кухонных шкафов»» Подвеска полок на саморезах под крышечку Camar»» Подвеска для навешивания шкафа, SCARPI-4»» Подвеска скрытая Camar 818»» Подвеска усиленная Camar»» Подвеска для нижних баз скрытый монтаж 821»» Подвеска для нижних баз 807»» Подвеска пластиковая универсальная»» Подвески БОЯРД» Направляющие, метабоксы, системы выдвижения»» Направляющие шариковые»» Направляющие роликовые»» Направляющие шариковые под клавиатуру»» Направляющие с доводчиком»» Направляющие push-to-open без амортизатора (выдвижение после нажатия)»» Направляющие push-to-open скрытый монтаж (выдвижение после нажатия)»» Направляющие PUSH+SOFT CLOSING (выдвижение после нажатия)»» Направляющие скрытого монтажа»» Метабоксы»» Система выдвижения ящиков B-Box (Боярд)»» Система выдвижения СТАРТ (Боярд)»» Система выдвижных ящиков Freebox (Гратис)»» Система выдвижных ящиков Slim Box (Гратис)»» Система выдвижных ящиков Moovit (Hafele)»» Система выдвижных ящиков NOVA PRO DELUXE (Grass)»» Система выдвижных ящиков Tipmatic Plus (Grass)» Ограничители» Опоры мебельные, подпятники»» Колесные опоры»» Кухонные опоры»» Опоры для шкафов»» Опоры барные и ножки для столов»» Подпятники»» Стационарные опоры»» Опоры для мягкой мебели» Поворотные механизмы» Полкодержатели, уголки» Петли мебельные»» Петли для деревянных фасадов простые»» Петли для деревянных фасадов с доводчиком»» Петли для стеклянных фасадов»» Петли для алюминиевых фасадов»» Петли без пружины (Push)»» Карточные петли»» Рояльные петли»» Секретерные петли»» Универсальные петли» Подъемные механизмы/Газ-лифты»» Подъемный механизм FREE FOLD»» Подъемный механизм FREE FLAP»» Подъемный механизм AEROBUS»» Подъемный механизм GL»» Подъемный механизм VERSO»» Подъемный механизм STRATO»» Подъемный механизм L-80»» Подъемный механизм F-20»» Подъемный механизм Maxi C» Полки для ванной» Профиль соединительный для ДВП» Ручки мебельные»» Ручки мебельные Гратис»» Ручки мебельные Боярд»» Ручки мебельные Валмакс»» Ручки мебельные бронза»» Ручки рейлинговые»» Ручки керамика»» Ручки детские»» Ручки-стразы»» Ручки-кнопки»» Ручки врезные»» Ручки мебельные распродажа»» Ручки профильные накладные» Крепежная фурнитура, метизы» Система труб Joker» Скотч, клей для крепления и монтажа Чистящие средства Шторка-жалюзи» Инструкция по сборке Крепежная и соединительная фурнитура Замки/защелки мебельные
Название
Артикул:
Текст
Размер опоры, мм:Все710*46*46710*60*60820*46*464мм1200х600х502800х1220х85,4х27 мм710 мм5,4х27 мм6м820*60*6050смх300м 17мкр2,6 м.![]() 2500х1200х12,5однорожковый2800х610х82,8*1,25*0,02 м.5,4м3м2800х610х18820 мм820100х30d-5052071047х5040х40х5012060х50100х38150х3070100х40100х40х40100х38х3840х40х15010080150х50520h-54 735100х3827х50150х30150х5060х40х40730 × 667100х25х2527х5040х40х100100х38100х60150х50100х4047х50100х38150х3070100х50150х50730х60х60100х25х2540х40х70150710 150х5060х4047х50110027х50100х30d-5050х60100х5080х5060х40х40520730х40х40100х25х2540х40х6060х50d-4027х501100 мм100х30145-165100х4060140453030х60/725х59540х40х755040х40/725х20072540х50120х50h-5494518201100х60х60710х60х60820х60х60710х50820х601100Х60710Х60710х46х461000х4001000х500950х590
2500х1200х12,5однорожковый2800х610х82,8*1,25*0,02 м.5,4м3м2800х610х18820 мм820100х30d-5052071047х5040х40х5012060х50100х38150х3070100х40100х40х40100х38х3840х40х15010080150х50520h-54 735100х3827х50150х30150х5060х40х40730 × 667100х25х2527х5040х40х100100х38100х60150х50100х4047х50100х38150х3070100х50150х50730х60х60100х25х2540х40х70150710 150х5060х4047х50110027х50100х30d-5050х60100х5080х5060х40х40520730х40х40100х25х2540х40х6060х50d-4027х501100 мм100х30145-165100х4060140453030х60/725х59540х40х755040х40/725х20072540х50120х50h-5494518201100х60х60710х60х60820х60х60710х50820х601100Х60710Х60710х46х461000х4001000х500950х590
ПроизводительВсеJokerСыктывкарский фанерный заводМакМартКомандорVPLКедрFamilyGP-Plast (Китай)Rehau (Германия)Dollken (Германия)МДМПАУЛ МАРКНайдиGRASS(Австрия)STERNDe Fran (Китай)МakmartАлвидEDSONКламетФМСМаксСтоунPaulmarkDollkenGRATIS (Россия)SAZАнтикТермопласт5638Экологическая Мебель на МеталлоКаркасеEltonsKostamonu1280489153 (126122)гл. 380-490, арт.32/72.N30/МТгл.380-490, арт. 32/72.N40/BIгл.380-490, арт.32/72.N40/МТгл.380-490, арт.32/72.N45/МТгл.380-490, арт.32/72.N50/МТгл.380-490, арт.32/72.N60/BIгл.380-490, арт.32/72.N60/МТгл.380-490, арт.32/73.N35/GRгл.422-450, арт.ТЕ13.2668.05.013ЕмарVIBO (Италия)Пара-ПластUNIONPLASTAGOFORMKessebohmerGranFest-ECOMAKMARTElikorAlbicoФМС(Россия)ЮММEwigsteinGslightPolygranАГИДЕЛЬБоярдСлотексGTV «Меридиан»BesseyKleinSistemiOmasLeitzFreudEbirРослаGiustiВестаVOLPATOHafeleGRASSGRATISRauvarioАквастальMatteoUKINOXGranFestKornerСОЮЗСКИФARPA (Италия)ГратисPfleidererRehauEGGERСупер профильАГТ (Россия)AGTСпикаКроношпанВалмаксLAMARTY
32/72.N40/BIгл.380-490, арт.32/72.N40/МТгл.380-490, арт.32/72.N45/МТгл.380-490, арт.32/72.N50/МТгл.380-490, арт.32/72.N60/BIгл.380-490, арт.32/72.N60/МТгл.380-490, арт.32/73.N35/GRгл.422-450, арт.ТЕ13.2668.05.013ЕмарVIBO (Италия)Пара-ПластUNIONPLASTAGOFORMKessebohmerGranFest-ECOMAKMARTElikorAlbicoФМС(Россия)ЮММEwigsteinGslightPolygranАГИДЕЛЬБоярдСлотексGTV «Меридиан»BesseyKleinSistemiOmasLeitzFreudEbirРослаGiustiВестаVOLPATOHafeleGRASSGRATISRauvarioАквастальMatteoUKINOXGranFestKornerСОЮЗСКИФARPA (Италия)ГратисPfleidererRehauEGGERСупер профильАГТ (Россия)AGTСпикаКроношпанВалмаксLAMARTY
НовинкаВседанет
СпецпредложениеВседанет
Результатов на странице5203550658095
Показать
Как выбрать кровать с подъемным механизмом, какие бывают механизмы
Автор статьи
Вероника Фортус
Эксперт по строительным материалам
Кровать с подъёмным механизмом — это мебель, конструкция которой включает полноценное спальное место с упругим матрасом, расположенным на прочной раме, и скрытый под ним ящик для хранения. Полезность такого предмета мебели очевидна, а вот кровать с каким именно механизмом выбрать, рассказывает статья.
Полезность такого предмета мебели очевидна, а вот кровать с каким именно механизмом выбрать, рассказывает статья.
Виды подъёмных механизмов
Выделяют подъемные механизмы 3 видов: ручной, пружинный, на газовых амортизаторах.
Ручной подъёмный механизм
Основание поднимается на петлях, закрепленных с одной стороны спального места. Преимущества ручного механизма:
- надежность работы;
- долговечность;
- простая конструкция не требует ремонта и замены деталей;
- низкая стоимость.
Недостаток — необходимость поднимать вес основания на руках, что достаточно тяжело. Поэтому такие конструкции не рекомендуют ставить в детских комнатах. По этой же причине желательно не использовать тяжёлые ортопедические матрасы.
Пружинный механизм подъёмной кровати
В таких моделях подъём спального места выполняется за счет работы витых пружин. Плюсы пружинного механизма:
- незначительный вес и размеры;
- более легкая по сравнению с ручными петлями трансформация кровати;
- недорогой.

Недостаток механизма — недолговечность. Со временем пружины изнашиваются и теряют упругость, а соединения стираются. Их периодически приходится менять (в среднем раз в 2-3 года).
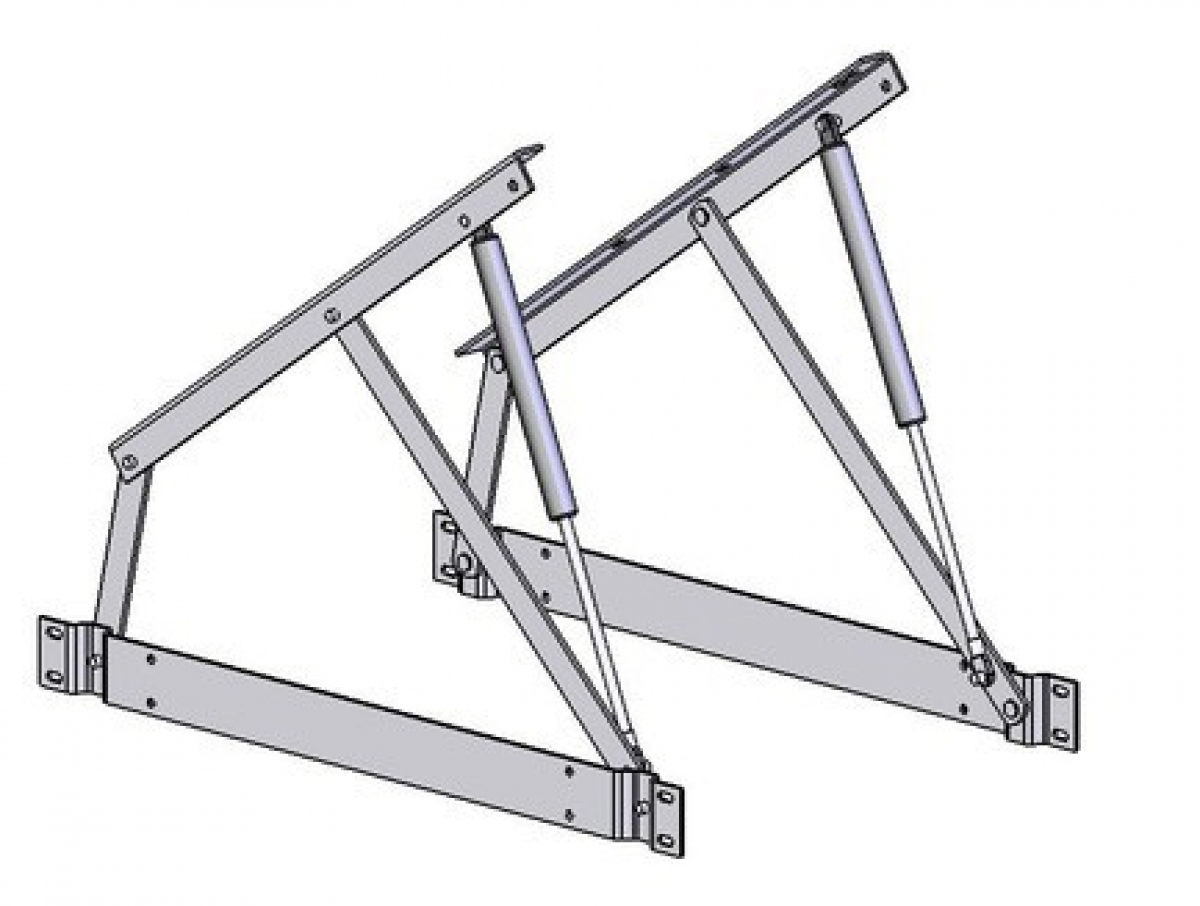
Подъёмная кровать с газлифтом
Это надежный, долговечный и простой в эксплуатации механизм. Конструкция состоит из оси вращения и расположенных вокруг неё металлических пластин и газлифтов, которые создают равномерное распределение нагрузки. Кровать поднимается автоматически за счет давления азота в амортизаторах, при этом происходит вращение пластин вокруг металлической оси.
Преимущества кроватей с газлифтами:
- простота и легкость использования — для подъёма основания кровати прикладываются минимальные усилия;
- бесшумная работа;
- надёжность и долговечность — не требуется ремонт и замена деталей;
- высокая грузоподъёмность — механизм выдерживает вес до 100 кг;
- безопасность — движущиеся части скрыты в кожухе, поэтому исключается риск травмы.

Недостатки газовых амортизаторов:
Как выбрать кровать для ребенка
Читать- высокая стоимость;
- незначительное ухудшение внешнего вида кровати — амортизаторы видно в сложенном виде;
- невозможно «на глаз» определить качество деталей, их надёжность выявляется только в процессе эксплуатации.
Механизм и возможные габариты подъёмной кровати
На стоимость и надёжность кровати с подъёмным механизмом влияют её габариты и тип конструкции:
- Модели с вертикальным подъемом всего основания — шкафы-кровати. Спальное место полностью поднимается и убирается к стене.
- Кровати с горизонтальным подъёмом основания. В этом случае поднимается либо вся плоскость постели параллельно полу (такой принцип также используется в двуспальных моделях с подъемным верхним уровнем), либо только одна сторона «книжкой».
Во втором случае подъем спального места выполняется к изголовью или сбоку.

Материал
От этого параметра зависит стоимость мебели и вес конструкции. Это важно для выбора типа подъёмного механизма и его мощности (для газлифтов). Каркас кровати делают из металла, массива натурального дерева, ДСП и МДФ. Также встречаются комбинированные варианты. Каркас может быть обтянут мягким покрытием из текстиля (микрофибра, велюр), натуральной или искусственной кожей. Для дополнительного комфорта используют мягкие наполнители. Кроме того, дополнительные покрытия выполняют эстетическую функцию, закрывая детали подъёмного механизма.
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 :
: Boyard
Boyard :
: :
: 121 на 12 киллограм (120N)
121 на 12 киллограм (120N) :
: :
:Подъемные механизмы на кухне для фасадов от Nobilia
Задумывались ли вы над тем, насколько способны упростить нашу жизнь незаметные приспособления для кухонных шкафов? Речь о фурнитуре и подъемных механизмах для кухни, которые позволяют открывать фасады шкафчиков.
В этой статье мы расскажем обо всех типах механизмов, а в конце вас ждет видео с подробной демонстрацией всех вариантов.
Расхожая фраза «на этом нельзя экономить» к фурнитуре относится на все сто, и вот почему. Вспомните, приходилось ли вам сталкиваться с перекошенными дверцами кухонных навесных шкафчиков, которые или отказывались закрываться красиво и ровно, или демонстрировали совершенно неприглядную щель.
Или с некачественными петлями, через год-два становившимися «тугими» или наоборот, «слабыми», и створки дверец начинали хлопать так сильно, что слышно было во всей квартире. Согласитесь, и некрасиво, и неудобно. Именно об этом современные производители и предлагают забыть, воспользовавшись следующими техническими решениями.
Лифт для кухни
Своеобразный подъемный кран, предназначенный для верхних навесных кухонных шкафчиков, дверцы которых открываются наверх. Принцип действия следующий – вы даете импульс открытия, и пружина доводит дверцу до открытия полного. Преимуществ у этого решения множество:
Преимуществ у этого решения множество:
- плавный ход: дверцы красиво открываются и закрываются «сами собой»
- надежная фиксация дверцы наверху: это освобождает ваши руки
- бесшумность: как раз за счет гидравлического амортизатора
- возможность использовать шкафы без ручек: это один из существующих трендов
- надежность и долгий срок службы
- эстетичность: механизм выглядит современно и стильно
Механизмы с доводчиком (демпферы)
Доводчик – это также пружина, помещенная в металлическую капсулу, плотно заполненную маслом или газом. Их используют как для выдвижных ящиков кухонных шкафов, так и для открывающихся фасадов. Доводчики позволяют создавать плавное открытие и закрытие, причем абсолютно бесшумное. Уменьшают необходимую степень приложения силы. Плотность прилегания дверцы к шкафчику и скорость закрытия можно регулировать при помощи специальных клапанов.
Важно! Огромный плюс доводчиков кухонных шкафов – продление жизни вашей кухни. За счет плавного опускания дверцы уменьшается количество возможных повреждений поверхности шкафов, что особенно важно, если у вас стеклянные дверцы.
5 причин выбрать кровать с подъемным механизмом
Назад- Hoff Блог
Все включеноПри покупке кровати с подъёмным механизмом вам не придется искать, подбирать или докупать подходящее основание – оно идет в комплекте с механизмом, рассчитанным на конкретную нагрузку. |
|
Оптимизация храненияПодъемный механизм обеспечивает беспрепятственный доступ к пространству под основанием кровати, открывая просторную и высокую нишу для хранения вещей. В отсеке под кроватью без труда разместятся подушки, одеяла, пледы и другие постельные принадлежности. Найдется место и для коробок с обувью или игрушками, и для сезонной одежды. Такая кровать по объему хранения прекрасно заменит шкаф или комод и избавит от загромождения комнаты лишней мебелью. |
|
Легкая уборкаЕще одна особенность кровати с подъемным механизмом в том, что ее конструкция практически полностью касается пола. Отсутствие зазоров исключает появление и скопление пыли – нет необходимости пылесосить и мыть полы под кроватью. Уборка будет еще проще, если складывать вещи в специальные коробки и чехлы. |
|
Экономия пространстваЗачастую помещение, отведенное под спальню, имеет достаточно скромные размеры. Конструкционные особенности кровати с подъемным механизмом позволяют не только создать комфортное пространство для сна, но предоставляют возможность установить мебель там, где, на первый взгляд, для нее недостаточно места. Подъемные кровати более удобны, чем подобные модели с выдвижными блоками, так как габариты комнаты не всегда позволяют полноценно пользоваться ящиками. Конструкционные особенности кровати с подъемным механизмом позволяют не только создать комфортное пространство для сна, но предоставляют возможность установить мебель там, где, на первый взгляд, для нее недостаточно места. Подъемные кровати более удобны, чем подобные модели с выдвижными блоками, так как габариты комнаты не всегда позволяют полноценно пользоваться ящиками. |
|
Комфорт превыше всегоКровати с подъемным механизмом оснащены жестким ортопедическим основанием, выполняющим роль своеобразной опоры, которая поддерживает позвоночник и обеспечивает комфорт во время сна. Надежная конструкция основания гарантирует длительный срок эксплуатации мебели. |
В избранноеИз избранного
В избранноеИз избранного
В избранноеИз избранного
В избранноеИз избранного
В избранноеИз избранного
В избранноеИз избранного
Все кровати с подъёмным механизмом
Все кровати
Популярные записи
Как выбрать матрас? Выбрать даже из трех приглянувшихся моделей матрасов – сложно. Сегодня мы разберемся, на что смотреть, подбирая матрас для новой кровати или на замену старому. Как выбрать и не пожалеть? Выбираем диван по правилам! Как выбрать диван, который будет удобным и комфортным для каждого члена вашей семьи? Какой должна быть форма, обивка, нужны ли ножки и подлокотники? Выбор дивана — непростая задача, но наши советы позволят без особых затрат времени и сил подобрать удобную мебель. Как выбрать кровать? Удобная кровать — необходимая составляющая домашнего комфорта, поэтому сегодня мы расскажем, на что стоит обратить внимание при выборе кровати. Топперы: спальное место по цене подушки Если у вас есть неудобный диван, который нужно превратить в комфортное спальное место, если ортопедический матрас вдруг стал неудобным или вы хотите изменить его жесткость — значит, пришло время узнать чуть больше о топперах. Кожаный диван: плюсы и минусы Стоит ли выбирать диван из натуральной кожи, или лучше предпочесть тканевый? В этой статье мы взвесили все за и против. Как выбрать диван: механизмы трансформации Как известно, в разложенном виде диван меняет свое предназначение, внешний вид и размер, да и требования к дивану тоже становятся другими. Сегодня мы расскажем про основные механизмы трансформации диванов, ведь от них зависит, будет ли диван надёжен и удобен в использовании в качестве кровати. Как выбрать диван: особенности материалов обивки При выборе диванов немалое значение имеет материал обивки, ведь именно он определяет практические свойства мягкой мебели, ее внешний вид и долговечность. Чтобы не потеряться во всём многообразии выбора, сегодня мы расскажем об особенностях самых распространённых обивочных материалов. Как правильно распаковать матрас в рулоне? Скрученный в рулон матрас очень удобно транспортировать, но как правильно его распаковывать? Следуйте этим простым инструкциям… В ногу со временем: стеновые панели Создать уникальную кухню стало еще проще! Узнайте о наших новых стеновых панелях… Крошка-кухня Обставляем кухню, в которой помещаетесь только вы…и кот. Што?! Шторы! Выбираем одежду для окон по правилам и без. Как выбрать пуф?Простые или оригинальные, каркасные или мягкие, пуфы актуальны в любом интерьере. Сегодня мы расскажем об основных видах современных пуфов. Рулонные шторы: функциональный минимализм В отличие от традиционных портьер, рулонные шторы не затрудняют доступ к подоконнику, надёжно защищают от прямых солнечных лучей и настолько просты в обращении, что с ними справится даже ребёнок.
Узнайте больше о рулонных шторах в нашей статье! 3 кастрюли на все случаи жизни Делимся инструкцией по подбору универсальной посуды.
Последние записи
Подъемные механизмы | Климатическое управление Северной Каролины
Подъемные механизмы — это формы подъемников, которые заставляют воздух подниматься . В этом разделе мы рассмотрим орографический подъем, фронтальный подъем, конвергенцию и конвективный подъем.
Почему мне это нужно? Подъемные механизмы важны для образования облаков и дождя (в сочетании с влажностью и нестабильностью).
Я уже должен быть знаком с : фронты, стабильность, конвергенция и расхождение, конвекция
Воздух может двигаться вертикально по нескольким причинам, описанным ниже.Движение воздуха вверх может привести к образованию облаков и осадков, если влаги достаточно для достижения конденсации, поскольку воздух охлаждается при движении вверх. В стабильных условиях вертикальное движение воздуха будет плавным и вряд ли вызовет глубокую конвекцию, такую как грозы. Однако, если нестабильный воздух поднимается с помощью одного из механизмов, указанных ниже, это может вызвать взрывное развитие гроз и ливневых дождей.
В стабильных условиях вертикальное движение воздуха будет плавным и вряд ли вызовет глубокую конвекцию, такую как грозы. Однако, если нестабильный воздух поднимается с помощью одного из механизмов, указанных ниже, это может вызвать взрывное развитие гроз и ливневых дождей.
Орографический подъемник
Рисунок A.Орографический подъемник.
Орографический подъем на юго-востоке происходит в основном вдоль Аппалачских гор. Когда воздух движется через долины Огайо и Теннесси, он встречается с Аппалачскими горами. Поскольку воздуху некуда идти, кроме как вверх, он поднимается вверх по склону гор. По мере того, как воздух поднимается, он начинает охлаждаться и конденсироваться, и в зависимости от того, насколько влажная воздушная масса, могут образовываться ливни или грозы. После того, как воздух пройдет через горный хребет, он начнет опускаться и высыхать, а в некоторых случаях сильно согревает окружающий воздух.Много раз весной и осенью линии шквалов или суровые погодные условия пересекали Аппалачи и значительно ослабевали. Аппалачи в некотором смысле действуют как барьер против сильных штормовых систем, которые направляются на юго-восток из центральной части Соединенных Штатов. В Джорджии и Алабаме на южной оконечности Аппалачей ветры с юга, скорее всего, вызовут облака и дождь, поскольку воздух поднимается над южной оконечностью гор, а в горных районах этих штатов выпадает наибольшее годовое количество осадков из-за орографически вызванный дождь.
Аппалачи в некотором смысле действуют как барьер против сильных штормовых систем, которые направляются на юго-восток из центральной части Соединенных Штатов. В Джорджии и Алабаме на южной оконечности Аппалачей ветры с юга, скорее всего, вызовут облака и дождь, поскольку воздух поднимается над южной оконечностью гор, а в горных районах этих штатов выпадает наибольшее годовое количество осадков из-за орографически вызванный дождь.
Фронтальный подъемник
Как упоминалось в предыдущих разделах, фронты на погодных картах представляют собой передний край теплого или холодного воздуха. Оба типа фасадов могут обеспечивать подъемную силу во время дождя и грозы, но они не обладают такими характеристиками, как описано ниже.
Холодные фронты
Холодный воздух более плотный, чем теплый воздух, и в результате он подрезает и выталкивает теплый воздух вертикально вперед, когда он движется. Наклон холодного воздуха с холодным фронтом очень крутой, поэтому воздух быстро выталкивается вверх и иногда может приводить к сильным или сильным грозам при наличии достаточной влажности и нестабильности.
Рисунок B. Наступление холодного фронта.
Теплые фасады
На первый взгляд может показаться нелогичным, что теплые фасады могут обеспечивать подъемную силу; однако теплые фронты могут вызывать обильные осадки. В отличие от холодного фронта, который подрезает воздух у поверхности, теплый воздух теплого фронта поднимается над более холодным воздухом у поверхности из-за его более низкой плотности. Это обеспечивает подъем для облаков и ливней, образующихся вдоль и перед теплым фронтом. Наклон холодного / теплого воздуха на теплом фронте не такой крутой, как на холодном фронте.В результате, грозы скорее образуются с холодными фронтами, чем с теплыми.
Рисунок C. Наступление теплого фронта.
Конвергенция
Рисунок D. Конвергенция воздуха у поверхности.
В центре областей низкого давления ветры сходятся к центру низкого давления из-за эффектов трения. Поскольку воздух не может опуститься в землю, он должен подниматься вверх. Этот подъем из-за конвергенции приводит к наличию облаков и осадков вблизи центров низкого давления.Чем сильнее схождение, тем сильнее вертикальное движение и, вероятно, образуется больше облаков и осадков.
Этот подъем из-за конвергенции приводит к наличию облаков и осадков вблизи центров низкого давления.Чем сильнее схождение, тем сильнее вертикальное движение и, вероятно, образуется больше облаков и осадков.
Конвективный лифт
(См. Также конвекцию)
Когда солнце нагревает землю, нагретый воздух у поверхности поднимается под действием конвекции. Восходящие термики похожи на горячие пузырьки воды, поднимающиеся со дна кипящего котла. Если воздух стабильный, то пузырьки теплого воздуха образуют рассеянные кучевые облака при хорошей погоде и не более того.Если воздух нестабилен, то подъем из-за конвекции приведет к быстрому разрастанию облаков в глубокие кучево-дождевые облака или грозы. Чем выше температура поверхности, тем сильнее может возникать конвекция.
Как это относится к сельскому хозяйству?
Осадки на юго-востоке подвержены влиянию различных подъемных механизмов. В некоторых частях Вирджинии, Северной Каролины, Южной Каролины и Джорджии орографический подъемник обеспечивает дождем наветренные склоны Аппалачских гор. Озеро Токсавей, один из самых дождливых регионов Северной Каролины, имеет в среднем более 80 дюймов осадков в течение года из-за орографического подъема. Преобладающие ветры в этом регионе в основном дуют с юга и запада, а озеро Токсавей находится на наветренной стороне Аппалачских гор, что делает орографический лифт эффективным механизмом выпадения осадков.
Озеро Токсавей, один из самых дождливых регионов Северной Каролины, имеет в среднем более 80 дюймов осадков в течение года из-за орографического подъема. Преобладающие ветры в этом регионе в основном дуют с юга и запада, а озеро Токсавей находится на наветренной стороне Аппалачских гор, что делает орографический лифт эффективным механизмом выпадения осадков.
Рисунок E. Воздух, сближающийся внутри страны над Флоридой. (Изображение из Американского метеорологического общества).
Классическим примером того, как воздух сходится и образует ливневые дожди и грозы, является морской бриз во Флориде.Летом на западной и восточной сторонах Флориды часто дуют морские бризы. из-за разницы в температуре между сушей (которая нагревается быстро) и океаном (который нагревается медленнее), как показано на рисунке E. Когда два морских бриза движутся к суше на полуострове Флорида, они сталкиваются друг с другом, и воздух вынужден двигаться вверх. Где бы ни сталкивались два морских бриза, часто бывают сильные дожди и грозы, и это обеспечивает большую часть летних дождей во многих частях Флориды.
Конвективный лифт — наиболее распространенная форма лифта на юго-востоке летом, поскольку фронты проходят не так часто, как в остальное время года. Если воздух достаточно влажный (как это обычно бывает летом), могут образовываться грозы, которые могут вызвать осадки для сельскохозяйственных культур и растений. Во Флориде часто выпадает большая часть осадков в летние месяцы, поскольку конвективный подъем (вместе с морским бризом) вызывает образование гроз практически каждый день.
Хотите узнать больше?
Как формируются облака, типы осадков
DIY Электрический подъемный механизм для телевизора: подробные инструкции
Сегодня подъемные механизмы широко применяются как в бытовой, так и в промышленной автоматизации.Обладая, как правило, простой конструкцией, управляемой нажатием кнопки (локально или с помощью дистанционного управления), автоматизированные лифты могут помочь решить широкий спектр задач (грузовые перевозки, оптимизация положения, автоматическое открытие / закрытие дверей и окон, так далее. ). В этой статье мы расскажем, как сделать подъемный механизм и какие инструменты потребуются для этого. Мы также выделим наши топ-3 домашних решения, в которых используются обсуждаемые средства автоматизации (линейный привод).
). В этой статье мы расскажем, как сделать подъемный механизм и какие инструменты потребуются для этого. Мы также выделим наши топ-3 домашних решения, в которых используются обсуждаемые средства автоматизации (линейный привод).Описание подъемного механизма
Существует множество способов создания линейного движения, которое лежит в основе любого подъемного механизма.Самый распространенный вариант — это стержень (бегунок), который линейно перемещается в заданном направлении. Эта конструкция составляет корпус линейного привода. Винтовая передача обычно используется для создания линейных перемещений в конструкции линейного привода. Нажимной винт вращается по часовой стрелке или против часовой стрелки, в то время как вращение вызывает линейное движение ползуна, соединенного с охватывающим винтом, который движется вдоль охватываемого винта. Двигатели, используемые в линейных приводах, в основном представляют собой устройства, работающие на постоянном токе (DC) (хотя существуют также пневматические и гидравлические двигатели, которые, однако, немного устарели; мы обсудим их ниже).
Чтобы изменить направление движения ползуна линейного привода (т.е. заставить механизм двигаться вниз, а не вверх), необходимо изменить направление движения его двигателя. Если мы говорим об использовании двигателя, который питается от постоянного тока, достаточно изменить полярность питания (то есть переключить два провода питания двигателя). Самым тривиальным решением этой задачи было бы использование специального переключателя для настройки полярности. Для остановки стержня в конечных положениях (в контексте подъемного механизма это означает остановку его движения и фиксацию в определенном положении) имеется привод со встроенными микровыключателями, которые срабатывают в момент достижения винтом крайнее положение внутри корпуса актуатора.Такие микровыключатели снабжены специальными индикаторами (один из которых устанавливается в крайнее положение, другой — в противоположную крайнюю точку).
Индикаторы помогают выключить мощность двигателя при касании винтом крайних точек. В приводах также используются такие элементы, как редуктор для достижения достаточной скорости вращения. Этот элемент может изменять скорость вращения стержня, что в конечном итоге влияет на конечную скорость линейных перемещений. Это также влияет на силу, с которой перемещается шток — чем выше передаточное число редуктора, тем больше сила и меньше скорость.Однако, даже если ваш привод имеет самую примитивную конструкцию и в нем не используется редуктор, скорость штока все равно зависит от силы, прилагаемой к его движению: чем выше скорость движения штока, тем меньше сила (и наоборот. наоборот).
В приводах также используются такие элементы, как редуктор для достижения достаточной скорости вращения. Этот элемент может изменять скорость вращения стержня, что в конечном итоге влияет на конечную скорость линейных перемещений. Это также влияет на силу, с которой перемещается шток — чем выше передаточное число редуктора, тем больше сила и меньше скорость.Однако, даже если ваш привод имеет самую примитивную конструкцию и в нем не используется редуктор, скорость штока все равно зависит от силы, прилагаемой к его движению: чем выше скорость движения штока, тем меньше сила (и наоборот. наоборот).
Типы линейных приводов
Как мы уже упоминали, наиболее доступный способ создания подъемного механизма — это положить в основу линейный привод. По принципу работы линейные приводы можно разделить на: Электрические линейные приводы преобразуют обычное электричество в движение, определяемое законами механики.В них используются электрические роторные двигатели, которые преобразуют вращательное движение в поступательно-линейное. Таким образом, вращающийся элемент перемещает стержень с помощью механического трансформатора (например, посредством шарико-винтовой передачи или роликового винта) и вызывает плавное прямое движение.
Таким образом, вращающийся элемент перемещает стержень с помощью механического трансформатора (например, посредством шарико-винтовой передачи или роликового винта) и вызывает плавное прямое движение.
Пневматические поступательные приводы характеризуются наличием силового механизма внутри полого цилиндра, который приводится в действие с помощью давления, создаваемого внешним компрессором или насосом. По мере увеличения давления форсунка движется в конце.Чтобы вернуть форсунку в исходное положение, с другой стороны форсунки впрыскивается шпора или сжатый газ. Наконец, что не менее важно, гидроподъемник на основе линейного гидропривода работает по схеме пневмопривода.
Однако в нем используется жидкость, закачиваемая извне. Примечательно, что наиболее популярным типом актуаторов является электрический. Они редко ломаются и могут быть заключены в максимально компактный форм-фактор. Более того, этот тип приводов считается наиболее эффективным с точки зрения скорости движения, точности и тягово-вытяжной мощности.
Как создать подъемный механизм
Итак, как построить подъемный механизм? Чтобы реализовать конструкцию в одиночку, вам потребуются две вещи: правильно подобранный линейный привод и переключатель для управления им. Остальное, в частности, монтажные детали подъемного механизма, будут напрямую зависеть от конструктивных особенностей того или иного устройства или оборудования, использующего линейный привод. Итак, поговорим о выборе прямоходного привода. Как вы уже поняли, это компактный и экономичный с точки зрения потребления электроэнергии двигатель, состоящий из направляющей и винта червячной передачи.
Для перемещения слайдера обычно требуется питание 12 В или 24 В (хотя существуют модели с различными техническими характеристиками). Этой мощности будет вполне достаточно, чтобы объект, соединенный со скользящим элементом, двигался вверх и вниз по направляющей. Линейки доступны в широком диапазоне характеристик, таких как грузоподъемность, длина направляющих и мощность. Это означает, что вы можете выбрать вариант подгонки в зависимости от того, насколько быстро вам нужно двигаться или насколько тяжелый вес вам нужно поднять.В частности, обратите внимание на модели, которые могут выдерживать вес, который примерно в полтора раза превышает ваш максимальный запланированный вес.
Это означает, что вы можете выбрать вариант подгонки в зависимости от того, насколько быстро вам нужно двигаться или насколько тяжелый вес вам нужно поднять.В частности, обратите внимание на модели, которые могут выдерживать вес, который примерно в полтора раза превышает ваш максимальный запланированный вес.
Для каких целей можно использовать подъемные механизмы?
Сфера применения здесь очень широка и разнообразна. Подъемные механизмы с линейным приводом могут использоваться повсеместно — от регулирования положения телевизора до подъема и спуска по пандусам для инвалидных колясок, автоматизации промышленного оборудования, морского производства и даже технологий воздушного пространства.Если вы хотите попрактиковаться в создании подъемных механизмов и попробовать построить один из них лично, вы можете попробовать создать один из трех вариантов бытовой автоматики: подъемник ножничный
Подъемные механизмы с линейным приводом могут использоваться повсеместно — от регулирования положения телевизора до подъема и спуска по пандусам для инвалидных колясок, автоматизации промышленного оборудования, морского производства и даже технологий воздушного пространства.Если вы хотите попрактиковаться в создании подъемных механизмов и попробовать построить один из них лично, вы можете попробовать создать один из трех вариантов бытовой автоматики: подъемник ножничный- ;
- лифт для телевизора;
- подъемный стол.
PA для использования в этом проекте
Как вы уже выяснили, линейные приводы различаются по длине привода.Это означает, что разные предметы изготавливаются с различными ползунками и разной длиной корпуса. Помимо длины привода, другими важными характеристиками являются скорость и сила ползуна. Progressive Automations предлагает широкий ассортимент линейных приводов по доступным ценам. Каждая модель, представленная на нашем веб-сайте, может быть использована в широком спектре отраслей и ниш в зависимости от условий использования (доступны устройства с уровнем защиты IP67) и наших индивидуальных пожеланий.
Каждая модель, представленная на нашем веб-сайте, может быть использована в широком спектре отраслей и ниш в зависимости от условий использования (доступны устройства с уровнем защиты IP67) и наших индивидуальных пожеланий.Лучшие проекты подъемных механизмов
Фактически, линейные приводы могут помочь в создании прекрасных решений автоматизации даже исключительно для бытовых целей.Ниже мы предлагаем вам взглянуть на наши топ-3 решения, в которых используются линейные приводы, и это может быть интересным проектом для любителей DIY:
- ножничный подъемный механизм;
- механизм подъема стола стоя;
- механизм подъема кровати.
Заключение
Мы очень надеемся, что наша статья поможет вам понять, как в двух словах сделать простой подъемный механизм.Как видите, построить что-то подобное для домашних нужд не так уж и сложно. Хотя, если вам нужен подъемник для автоматизации производственных задач, лучше доверить его сборку профессионалам. Вы можете выбрать наиболее подходящую именно вам модель корпуса прямо в нашем интернет-магазине. Мы снабжаем все наши модели 18-месячной гарантией и настраиваем их в соответствии с вашими индивидуальными требованиями и потребностями. Кроме того, вы также можете выбрать готовые механизмы листинга (например, для столов и телевизоров).
Вы можете выбрать наиболее подходящую именно вам модель корпуса прямо в нашем интернет-магазине. Мы снабжаем все наши модели 18-месячной гарантией и настраиваем их в соответствии с вашими индивидуальными требованиями и потребностями. Кроме того, вы также можете выбрать готовые механизмы листинга (например, для столов и телевизоров).Подъемные механизмы — Лаборатория инноваций Surrey Robotics
Знакомство с подъемными механизмами
В этом разделе мы исследуем методику подъема игровых фигур / роботов. Как вы, возможно, уже видели, для набора очков в соревновании по робототехнике может потребоваться поднять игровые фишки на определенную высоту, как показано ниже:
Существует широкий выбор различных типов подъемных систем, из которых можно наиболее эффективно поднимать предметы и набирать очки.Некоторые из них построить проще, чем другие, и не все подъемные системы могут выполнять одну и ту же задачу.
степени свободы
Чтобы понять, как работают подъемные системы, мы сначала должны охватить степени свободы, которые может иметь система, и то, как работают вращающиеся соединения.
Степень свободы относится к способности системы двигаться одним независимым движением. Если система может двигаться в нескольких направлениях, у нее есть несколько степеней свободы. Способность системы выполнять задачи может быть ограничена количеством степеней свободы, которые она может иметь.
№ 1
Первый тип степени свободы — это степень свободы, при которой рука робота может вращаться вокруг оси, параллельной руке. Это похоже на степень свободы человеческого запястья.
Если вы держите карандаш параллельно земле в кулаке и вращаете его так, чтобы карандаш был перпендикулярен земле, это представляет собой степень свободы вращения.
№ 2
Второй тип степени свободы связан с линейным перемещением.В этом случае компонент робота может скользить внутрь и наружу (это может создавать движение вверх и вниз или движение из стороны в сторону). Это такая же степень свободы, как у ящика стола; он может только скользить внутрь или наружу.
Ниже представлен GIF-файл, в котором показано, как выдвигается и выдвигается ящик стола.
№ 3
Третий тип степени свободы — это степень свободы, при которой происходит вращение вокруг оси, перпендикулярной руке. Локоть человека является примером вращательного сустава с такой степенью свободы.
Чрезвычайно сложные роботы, такие как изображенные ниже, могут сочетать несколько степеней свободы для выполнения сложных задач:
Вращающиеся шарниры
Вращающиеся шарниры часто используются в подъемных системах разных типов, поэтому важно научиться не подвергать эти типы шарниров нагрузкам и избегать отказов / поломок. Как мы узнали в блоке механической передачи энергии, передача может использоваться для снижения нагрузки на двигатель / соединение.На изображениях выше вы можете увидеть простое вращающееся соединение, в котором вся нагрузка ложится на один двигатель. Однако, используя редуктор, мы можем снизить нагрузку на двигатель, как показано ниже.
Как мы узнали в блоке механической передачи энергии, передача может использоваться для снижения нагрузки на двигатель / соединение.На изображениях выше вы можете увидеть простое вращающееся соединение, в котором вся нагрузка ложится на один двигатель. Однако, используя редуктор, мы можем снизить нагрузку на двигатель, как показано ниже.
Этот шарнир имеет две ступени редуктора 12:60. Вторая ступень прикреплена непосредственно к руке робота. Вторая ступень также имеет два одинаковых редуктора, работающих параллельно; это означает, что нагрузка равномерно распределяется на эти два набора шестерен. За счет снижения нагрузки на отдельные компоненты уменьшается вероятность отказа соединения (поломка шестерни и т. Д.).
Типы лифтов
Бугельный подъемник
Штанговые подъемники используют вращательное движение для вращения рычага, обычно сделанного из с-образных каналов, для достижения высоких мест. Это вращательное движение позволяет объектам, прикрепленным к лифту, вращаться по дуге, что обычно приводит к вытягиванию прикрепленного механизма, когда он поднимается выше.
В наиболее распространенных бугельных подъемниках VEX используются параллельные с-образные каналы одинаковой длины, например, четырехбалочный подъемник, показанный ниже:
Когда лифт поворачивается… стержни остаются параллельными, чтобы съесть другиеДополнительные c-образные каналы могут быть добавлены для создания 6-барного лифта (изображенного ниже) или даже 8-барного лифта!
Реверсивный подъемник
Обратный барный подъемник — это разновидность барного подъемника, в котором используется барный подъемник, прикрепленный к другому барному подъемнику, обращенный к противоположной стороне первого подъемника.Это позволяет роботу подниматься несколько выше обычного подъемника и поднимать прикрепленные к нему предметы почти вертикальным движением. Несмотря на то, что они похожи на простой барный подъемник, обратный барный подъемник гораздо сложнее построить. Их можно «забивать» из самого нижнего шарнира или из центрального шарнира.
Это отличное видео на YouTube для получения дополнительной информации о строительстве бугельных подъемников VEX: https://youtu.be/hZUbCSGAy-o
Линейный лифт
Линейный лифт использует линейную степень движения для движения вверх и вниз.Есть 2 типа подъемников для лайнеров, но они выполняют одно и то же.
В подъемникахLinear Slide используются детали из набора Vex для линейного перемещения. Реечные шестерни, приводимые в действие двигателем и ведущей шестерней, используются для перемещения линейной направляющей вверх и вниз. Механизм выглядит примерно так:
Простой линейный подъемник Линейные цепные подъемникиработают аналогично скользящим подъемникам, но для них не требуются детали из комплекта линейного перемещения. Вместо этого для подъема и опускания подъемника используются цепи и звездочки:
Многоступенчатый линейный цепной подъемникНожничный подъемник
Последний тип подъемников — ножничный. Они позволяют роботу достигать высоких мест с помощью серии двух c-каналов, соединенных вместе в центре, называемом ступенями. Эти каскады прикреплены на каждом конце каждого c-канала и накладываются друг на друга. Из-за этих этапов ножничные подъемники обычно имеют самый высокий вылет из всех подъемников. Обычно конец одного куска металла прикреплен к точке поворота на шасси, а конец другого куска металла может скользить к первому концу по шасси. Это закрывает ножницы, поднимая две части.
Они позволяют роботу достигать высоких мест с помощью серии двух c-каналов, соединенных вместе в центре, называемом ступенями. Эти каскады прикреплены на каждом конце каждого c-канала и накладываются друг на друга. Из-за этих этапов ножничные подъемники обычно имеют самый высокий вылет из всех подъемников. Обычно конец одного куска металла прикреплен к точке поворота на шасси, а конец другого куска металла может скользить к первому концу по шасси. Это закрывает ножницы, поднимая две части.
Некоторые части этого учебного ресурса могут быть взяты из учебной программы по робототехнике VEX. Права собственности на изображения и другие материалы принадлежат их создателям, если это применимо.
Как это:
Like Loading …
Пневматические и гидравлические подъемники
Примеры доступных типов подъемников, включая подъемники со стрелой, ножничным механизмом и вертикальной мачтой.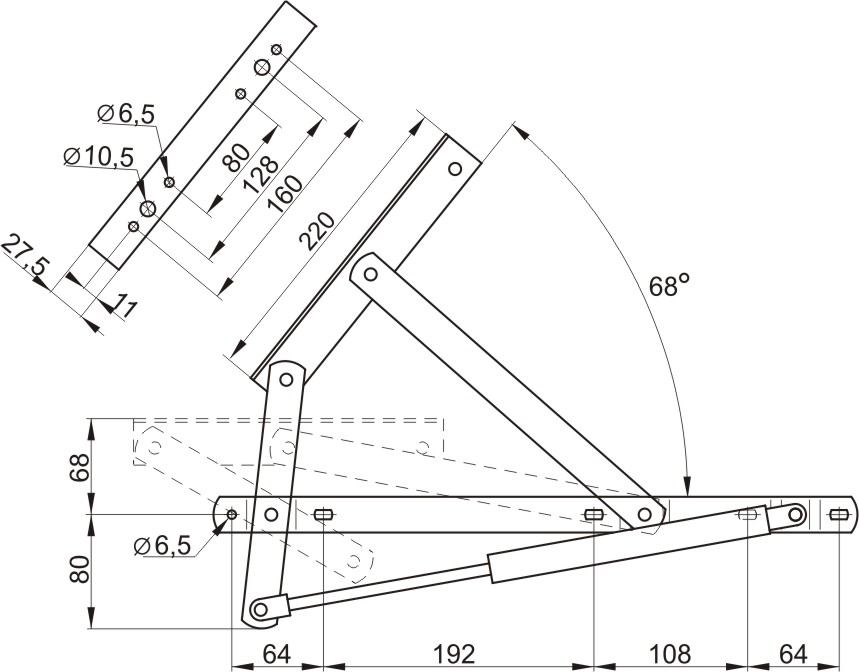
Кредит изображения: WINS86 / Shutterstock.ком
Пневматические и гидравлические подъемники — это два типа подъемников, которые широко используются в промышленности из-за их высокой грузоподъемности, большого диапазона выдвижения и универсальности для окружающей среды. Хотя доступно несколько классификаций лифтов, в большинстве жилых, коммерческих и промышленных применений подъемное действие обычно выполняется с помощью пневматического или гидравлического механизма. Однако механические подъемники также доступны для применений, не подходящих для пневматических или гидравлических подъемников, например, требующих ограниченного, но точного движения и бесшумной работы.
Помимо классификации по подъемному механизму, некоторые из других вариантов конструкции лифтов включают электрическую, газовую, дизельную или пропановую систему питания, переносную или стационарную, шарнирно-сочлененную или телескопическую, смонтированную на прицепе или грузовике, а также легкую или тяжелую . Основываясь на этих различных конструктивных характеристиках, доступен разнообразный выбор этих подъемных устройств для широкого спектра жилых, коммерческих и промышленных применений, включая доступность, техническое обслуживание и ремонт, погрузочно-разгрузочные работы, перемещение персонала, транспортировку, а также разгрузку и погрузку.
Основываясь на этих различных конструктивных характеристиках, доступен разнообразный выбор этих подъемных устройств для широкого спектра жилых, коммерческих и промышленных применений, включая доступность, техническое обслуживание и ремонт, погрузочно-разгрузочные работы, перемещение персонала, транспортировку, а также разгрузку и погрузку.
Хотя доступно несколько разновидностей лифтов, в этой статье основное внимание уделяется пневматическим и гидравлическим лифтам, исследуются различные конструкции и типы имеющихся и объясняются их соответствующие функции и механизмы. Кроме того, в этой статье приводятся рекомендации по выбору и общие области применения для каждого типа подъемника.
Гидравлический лифт: что такое (и не является) лифт?
Прежде чем вдаваться в подробности и различия между конкретными классификациями пневматических и гидравлических лифтов, необходимо сначала понять, что такое лифты, а именно то, что может и не может считаться лифтом.
Существует несколько различных типов подъемного оборудования и устройств с похожими механизмами, функциями и названиями, включая лифты. Термин «лифты» — это общий термин, относящийся к оборудованию, используемому в основном для подъема и опускания объектов, таких как товары, грузы, люди и машины, для жилых, коммерческих и промышленных применений. Помимо подъемников, другое подъемное оборудование и устройства также включают подъемники, лебедки, краны, лифты, приводы, позиционеры, манипуляторы, подъемники и домкраты.Как описано ниже, каждый из них способен поднимать объект, но их точный механизм, функция или промышленное применение могут отличаться от таковых у лифтов, что приводит к их классификации в качестве отдельной категории подъемного оборудования.
Термин «лифты» — это общий термин, относящийся к оборудованию, используемому в основном для подъема и опускания объектов, таких как товары, грузы, люди и машины, для жилых, коммерческих и промышленных применений. Помимо подъемников, другое подъемное оборудование и устройства также включают подъемники, лебедки, краны, лифты, приводы, позиционеры, манипуляторы, подъемники и домкраты.Как описано ниже, каждый из них способен поднимать объект, но их точный механизм, функция или промышленное применение могут отличаться от таковых у лифтов, что приводит к их классификации в качестве отдельной категории подъемного оборудования.
Изображение предоставлено: Unidex Inc.
Направление и приложение подъемной силы
Независимо от типа подъемника, сила, поднимающая объект, прикладывается снизу, толкает объект вверх от земли.Это происхождение и направление силы отличает их от других подъемных устройств, таких как подъемники, лебедки, краны или лифты, где подъемная сила обычно возникает над поднимаемым объектом, тянущим объект вверх от земли. В любом случае приложение силы допускает вертикальное, а в некоторых случаях и горизонтальное смещение объекта, с разницей в том, приводит ли сила к толкающему или тянущему движению.
В любом случае приложение силы допускает вертикальное, а в некоторых случаях и горизонтальное смещение объекта, с разницей в том, приводит ли сила к толкающему или тянущему движению.
Изображение предоставлено: kasarp studio / Shutterstock.com
Масштаб и величина смещения
Подъемники обычно работают на макроуровне, что означает, что они используются для подъема более крупных объектов и перемещения объектов на более значительные расстояния, чем другие устройства, такие как приводы и позиционеры. В то время как эти последние устройства могут создавать толкающие силы, некоторые из их приложений относятся к масштабу микроуровня, включая более мелкие объекты и производящие относительно небольшое смещение (часто измеряемое в микронах).Кроме того, лифты могут включать в себя приводные компоненты в конструкцию подъемного механизма, чтобы помочь создавать подъемную силу, но исполнительные механизмы сами по себе не являются подъемниками. Манипуляторы — хотя и способны работать на макроуровне — также обычно не перемещают объекты на большие расстояния, только изменяя ориентацию объекта в его исходном местоположении или перемещая объект в пределах небольшой ограниченной области.
Манипуляторы — хотя и способны работать на макроуровне — также обычно не перемещают объекты на большие расстояния, только изменяя ориентацию объекта в его исходном местоположении или перемещая объект в пределах небольшой ограниченной области.
Изображение предоставлено: Nordroden / Shutterstock.ком
Характеристики подъемных элементов
Подъемники, хотя и почти идентичны по названию, относятся к категории подъемного оборудования, отдельной от подъемников. Чтобы поднять объект, подъемники используют базовый компонент (например, платформу или руки), на которых опирается объект, и механизм, который создает на объект толкающую вверх силу. Вместе эти компоненты подъемника обеспечивают вертикальное перемещение объекта. Подъемники также могут вызвать вертикальное смещение объекта.Однако подъемники, например, использующие вакуумное давление или подъемные магниты, обычно должны быть физически прикреплены к объекту, чтобы механизм мог поднять его с помощью тянущего движения, или, в случае ручных подъемников, требуется, чтобы пользователь предоставил силу, которая поднимает не использовать подъемный механизм.
Изображение предоставлено: mipan / Shutterstock.com
Описание подъемного оборудования в промышленности
Домкраты, такие как домкраты для бутылок и барабанные домкраты, могут использовать аналогичные подъемные механизмы и используются в приложениях, аналогичных применению подъемников.Однако, несмотря на это сходство, промышленные стандарты обычно относят домкраты к категории подъемного оборудования и устройств, отличных от категории подъемников. Поэтому в следующей статье не рассматриваются домкраты.
Домкрат автомобильный гидравлический.Изображение предоставлено: Andrey_Popov / Shutterstock.com
Пневматические и гидравлические подъемные механизмы
Теперь, когда базовое понимание того, что такое лифты, а что нет, было получено, более подробное описание и подробности можно дать некоторым из более конкретных классификаций — i.е., пневматические и гидравлические подъемники.
используются различные приводные компоненты и механизмы для создания толкающей вверх силы, необходимой для подъема объекта. В конструкции подъемников интегрированы три основных типа приводов: пневматические, гидравлические и механические, причем первые два используются в качестве наиболее распространенных механизмов.
Пневматические подъемники
В пневматических подъемниках используется подъемный механизм, состоящий из полого цилиндра и поршня. Внешний двигатель или насос перемещает поршень внутри цилиндра, увеличивая внутреннее давление воздуха и заставляя цилиндр перемещаться вдоль оси поршня.Движение цилиндра вдоль оси создает линейную силу, которая затем используется для выдвижения компонентов подъемника, подъема или опускания объекта.
Преимущество использования пневматических лифтов — их коллективная универсальность. Многие модели пневматических подъемников не требуют электричества и могут использоваться в самых разных областях, включая экстремальные температуры и взрывоопасные области. Кроме того, пневматические механизмы недороги по сравнению с электрическими и гидравлическими, имеют точность +/- 0.1 дюйм, и может создавать подъемные силы порядка десятков тысяч фунтов силы (фунт-сила).
Кроме того, пневматические механизмы недороги по сравнению с электрическими и гидравлическими, имеют точность +/- 0.1 дюйм, и может создавать подъемные силы порядка десятков тысяч фунтов силы (фунт-сила).
Несмотря на эти преимущества, пневматические подъемники ограничены как размером привода, так и требованиями к компрессору. Во время подъема необходимо поддерживать рабочее давление, что делает пневматические подъемники менее эффективными, чем другие типы подъемников. Это постоянное давление требует постоянного потока сжатого воздуха, что также увеличивает общие эксплуатационные расходы. Кроме того, пневматические приводы обычно имеют размер для конкретного применения, что ограничивает универсальность конкретного подъемника спецификациями и требованиями исходного приложения.
Гидравлические подъемники
В гидравлических лифтах используется подъемный механизм, аналогичный механизму пневматических лифтов, за исключением того, что вместо сжатия воздуха гидравлический механизм сжимает жидкость (то есть гидравлическое масло) для увеличения внутреннего давления в цилиндре. Как и в пневматических лифтах, увеличение внутреннего давления вызывает линейное движение приводного цилиндра, который, в свою очередь, поднимает или опускает платформу и, следовательно, объект.
Как и в пневматических лифтах, увеличение внутреннего давления вызывает линейное движение приводного цилиндра, который, в свою очередь, поднимает или опускает платформу и, следовательно, объект.
Гидравлические подъемные механизмы способны создавать в 25 раз больше силы, чем аналогичные пневматические подъемные механизмы.Кроме того, они могут поддерживать постоянную силу и крутящий момент без необходимости в непрерывном потоке жидкости, как в пневматических механизмах.
Однако, в отличие от пневматических и электрических подъемных механизмов, гидравлические механизмы имеют больший риск воздействия на окружающую среду, поскольку компоненты содержат гидравлическую жидкость, которая может нанести вред окружающей среде в случае утечки. Кроме того, гидравлические подъемные механизмы состоят из нескольких компонентов и деталей, что приводит к увеличению занимаемой площади.
Альтернативные решения для подъемных механизмов
Для применений, не подходящих для пневматических и гидравлических подъемников, механические подъемники представляют собой альтернативное подъемное решение. В этих подъемниках используется несколько различных механических компонентов в зависимости от модели, включая ручные кривошипы, шариковые винты, ходовые винты (или силовые винты), реечные и шестеренные приводы, и они могут приводиться в действие вручную или приводиться в действие от электродвигателя. В любом механическом подъемнике подъемный механизм функционирует, преобразуя радиальное движение компонентов в линейное движение, которое затем проявляется как удлинение компонентов подъемника и подъем или опускание намеченного объекта.
В этих подъемниках используется несколько различных механических компонентов в зависимости от модели, включая ручные кривошипы, шариковые винты, ходовые винты (или силовые винты), реечные и шестеренные приводы, и они могут приводиться в действие вручную или приводиться в действие от электродвигателя. В любом механическом подъемнике подъемный механизм функционирует, преобразуя радиальное движение компонентов в линейное движение, которое затем проявляется как удлинение компонентов подъемника и подъем или опускание намеченного объекта.
Механические подъемники с электрическим приводом обеспечивают высочайший контроль, точность и аккуратность, а также позволяют масштабировать и воспроизводить возможности подъемника.По сравнению с пневматическими и гидравлическими механизмами, электрические подъемные механизмы производят меньше шума и представляют меньший риск для окружающей среды из-за отсутствия жидкости. Однако электрические подъемные механизмы обычно более дороги, а их подъемные возможности, например грузоподъемность, скорость и т. Д., Ограничены выбранным двигателем, сроком службы устройства и подходящими областями применения.
Д., Ограничены выбранным двигателем, сроком службы устройства и подходящими областями применения.
Подъемный механизм | Преимущества | Недостатки |
Пневматический |
|
|
Гидравлический |
|
|
Механический |
|
|
Расчетные характеристики лифта
Как указано выше, все лифты способны создавать толкающую вверх силу, которая при приложении к объекту перемещает вертикально — i. е., подъемы или «подъемы» — нем. Помимо этих общих квалификаций, доступны несколько вариантов конструктивных характеристик лифта для широкого диапазона применений, включая, как упоминалось ранее, тип используемого подъемного механизма. Помимо этой характеристики, другие основные варианты дизайна, которые может рассмотреть отраслевой профессионал или агент по закупкам, включают:
е., подъемы или «подъемы» — нем. Помимо этих общих квалификаций, доступны несколько вариантов конструктивных характеристик лифта для широкого диапазона применений, включая, как упоминалось ранее, тип используемого подъемного механизма. Помимо этой характеристики, другие основные варианты дизайна, которые может рассмотреть отраслевой профессионал или агент по закупкам, включают:
- Тип источника питания
- Мобильность
- Маневренность
Источник питания лифта
Источник энергии лифта обычно представляет собой двигатель (за исключением моделей с электрическим приводом) и обеспечивает необходимую мощность, которая приводит в действие подъемный механизм (пневматический, гидравлический или механический) и, если применимо, систему привода. .В лифтах используются пять основных типов источников энергии:
- Электрический
- Дизель
- Газ
- Двухтопливная
- Гибрид
Лифты с электроприводом
Лифты с электроприводом доступны как в стационарных, так и в передвижных моделях и, в зависимости от модели, работают от переменного или постоянного тока. Лифты с электроприводом, в которых используется конструкция без двигателей внутреннего сгорания и питаются от съемных блоков или аккумуляторов, являются единственным типом лифтов, обеспечивающим бесшумную работу без выбросов, что делает их пригодными для использования в помещениях.Поскольку лифтовые батареи являются перезаряжаемыми, долгосрочные расходы на топливо для лифтов с батарейным питанием обычно меньше, чем для лифтов с питанием от топлива. Кроме того, конструкция подъемника обеспечивает более компактную конструкцию по сравнению с другими конструкциями с электроприводом, что упрощает навигацию, маневренность и хранение в закрытых или ограниченных пространствах.
Лифты с электроприводом, в которых используется конструкция без двигателей внутреннего сгорания и питаются от съемных блоков или аккумуляторов, являются единственным типом лифтов, обеспечивающим бесшумную работу без выбросов, что делает их пригодными для использования в помещениях.Поскольку лифтовые батареи являются перезаряжаемыми, долгосрочные расходы на топливо для лифтов с батарейным питанием обычно меньше, чем для лифтов с питанием от топлива. Кроме того, конструкция подъемника обеспечивает более компактную конструкцию по сравнению с другими конструкциями с электроприводом, что упрощает навигацию, маневренность и хранение в закрытых или ограниченных пространствах.
Хотя лифты с электроприводом имеют некоторые преимущества с точки зрения воздействия на окружающую среду, долгосрочной стоимости и мобильности, они ограничены в отношении размера платформы, вертикального и горизонтального удлинения и грузоподъемности.Подъемники с батарейным питанием также требуют интеграции зарядной станции и замены батарей каждые 2–5 лет — в зависимости от использования, состояния и обслуживания — по цене от 200 до 500 долларов. Хотя долгосрочные затраты на эти лифты обычно ниже, чем на лифты, работающие на топливе, первоначальные затраты и затраты на техническое обслуживание относительно высоки.
Хотя долгосрочные затраты на эти лифты обычно ниже, чем на лифты, работающие на топливе, первоначальные затраты и затраты на техническое обслуживание относительно высоки.
Дизельные лифты
В отличие от лифтов с электроприводом, лифты с дизельным двигателем не являются экологически чистыми. Однако новые технологии дизельных двигателей, такие как двигатели Tier II, III и IV, обеспечивают высокую производительность, более длительные периоды эксплуатации и более низкие уровни выбросов выхлопных газов по сравнению со старыми моделями дизельных двигателей, при этом некоторые модели способны производить меньше выбросов. чем даже двухтопливные или бензиновые подъемники.Как правило, эти лифты также имеют большую площадь платформы, больший диапазон вертикального и горизонтального выдвижения, более высокую грузоподъемность и лучшую тягу, чем лифты с электрическим приводом. Эти преимущества делают дизельные подъемники подходящими для использования на открытом воздухе и в условиях пересеченной местности, например, на строительных и промышленных площадках.
В то время как новые модели производят меньше выхлопных газов, в целом лифты с дизельным двигателем производят больше выбросов и шума, чем лифты с электрическим приводом и другие лифты с приводом от двигателя, такие как лифты с газовым или газовым двигателем.Эти ограничения делают их непригодными для большинства применений внутри помещений.
Дополнительные ограничения, связанные с лифтами с дизельным двигателем, включают начальные и общие затраты. Хотя стоимость дизельного топлива, необходимого для работы дизельного двигателя, относительно невысока — в пределах 3-4 долларов США, — сам дизельный двигатель обычно требует больших капиталовложений и затрат на техническое обслуживание, чем другие источники энергии для лифтов. Некоторые модели с дизельным двигателем доступны с надбавкой в 5000 долларов по сравнению с моделями, работающими на газе, с оценкой в тысячи долларов с учетом дополнительных затрат на замену масла, замену компонентов, а также техническое обслуживание и ремонт в течение срока службы двигателя.
Лифты газовые
В лифтах с газовым двигателем, как и в лифтах с дизельным двигателем, используется двигатель внутреннего сгорания (ВС), который производит выбросы во время работы независимо от типа топлива, хотя некоторые виды топлива могут производить меньше выбросов, чем другие, в процессе сгорания. Хотя по сравнению с лифтами с электроприводом эти лифты менее экологичны, они также могут использовать более крупные платформы, поднимать большие грузы и увеличивать высоту и длину.В газовых лифтах используются несколько типов газов, включая бензин, природный газ и пропан. В зависимости от требований и спецификаций подъемных устройств каждый тип газа имеет свои преимущества и ограничения.
Бензин : из-за ограниченного количества автозаправочных станций, а также развития и растущей популярности лифтов, работающих на жидком пропане (LP) и двухтопливном топливе, лифты с бензиновым двигателем используются редко. Однако, если заправочные станции легко доступны и легко доступны, лифты с бензиновым двигателем могут быть сопоставимы с другими лифтами с приводом от двигателя. Кроме того, конструкция с газовым двигателем обеспечивает большую видимость сзади по сравнению с конструкциями с двигателем LP, большую мощность, более быстрое перемещение и большую скорость подъема / опускания платформы по сравнению с конструкциями с дизельным двигателем.
Кроме того, конструкция с газовым двигателем обеспечивает большую видимость сзади по сравнению с конструкциями с двигателем LP, большую мощность, более быстрое перемещение и большую скорость подъема / опускания платформы по сравнению с конструкциями с дизельным двигателем.
Природный газ : Подобно лифтам с бензиновым двигателем, лифты, работающие на сжатом природном газе (СПГ), требуют быстрого и легкого доступа к заправочным станциям, чтобы быть экономичным подъемным решением. Однако высокая стоимость инфраструктуры, необходимой для заправочных станций КПГ, включая землю, оборудование, техническое обслуживание и установку, а также сложность получения необходимых разрешений и подачи газа, как правило, делают источники энергии на КПГ непригодными для бюджетов большинства подъемных систем.
При наличии адекватной и доступной инфраструктуры для заправки КПГ по сравнению с другими видами топлива КПГ предлагает более экологичную альтернативу. Процессы сжигания, в которых используется КПГ, обычно производят меньше выбросов, и в случае утечки газа КПГ рассеивается в атмосфере в виде нетоксичных соединений, то есть водяного пара и диоксида углерода. Конструкции лифтов с приводом от КПГ также не требуют снятия резервуара для КПГ во время процесса заправки, что позволяет сократить время простоя и участие оператора.
Конструкции лифтов с приводом от КПГ также не требуют снятия резервуара для КПГ во время процесса заправки, что позволяет сократить время простоя и участие оператора.
Пропан : Лифты, в которых используется сжиженный нефтяной газ, также известный как жидкий пропан (LP), предлагают самую низкую начальную стоимость, так как резервуары LP могут быть приобретены и сохранены заранее. Замена пустых резервуаров также выполняется относительно быстро, что сокращает время простоя между подъемными операциями. Подъемники с приводом от низкого давления подходят как для внутреннего, так и для наружного применения.
Двухтопливные подъемники
Как видно из названия, в двухтопливных лифтах используются два разных типа топлива — газ и дизельное топливо.Преимущество использования этих типов лифтов заключается в их высокой топливной экономичности по сравнению с другими лифтами, работающими на топливе. Кроме того, более новые модели с двухтопливным двигателем способны производить больше лошадиных сил, чем модели с дизельным двигателем.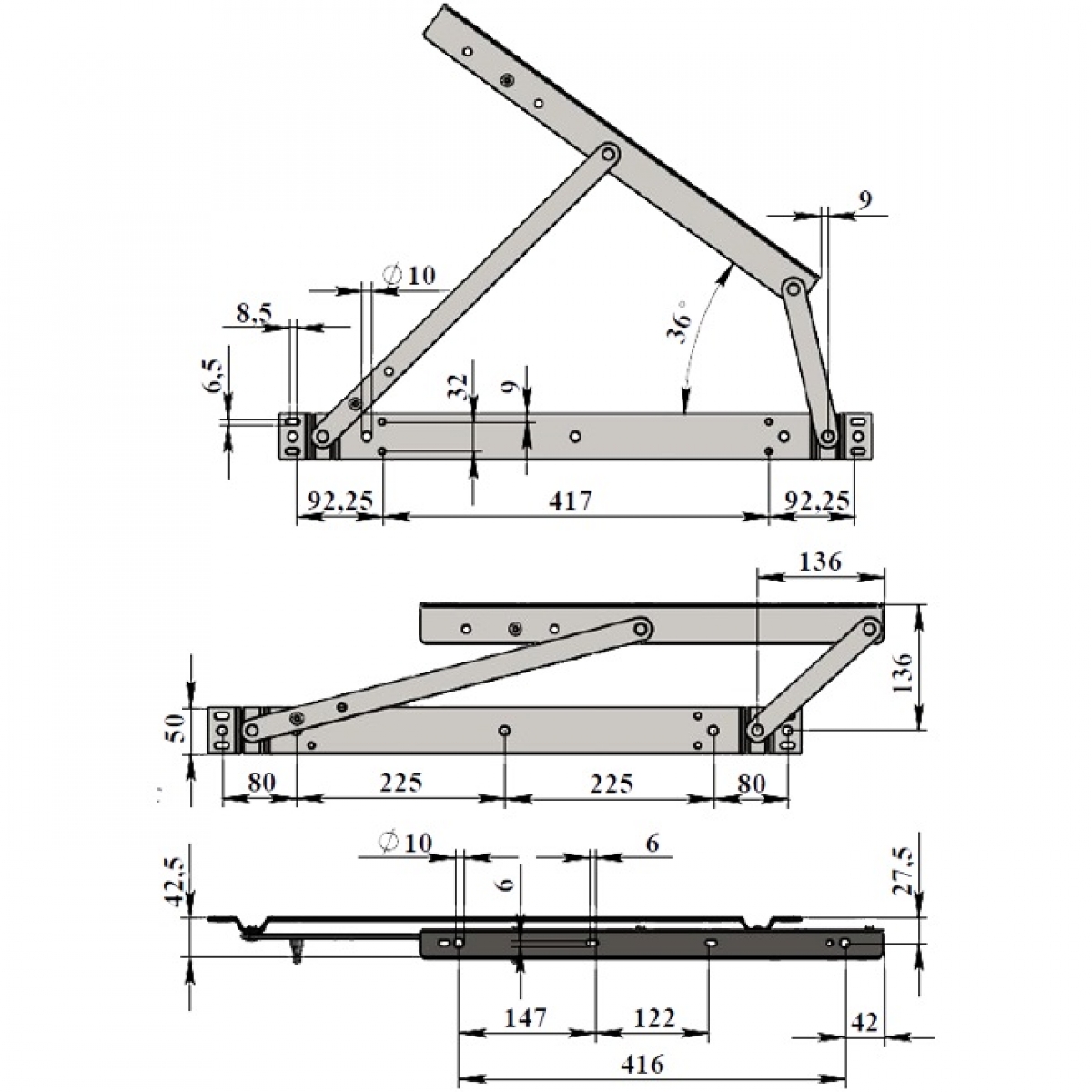 Однако стоимость топлива, используемого для двухтопливных лифтов (обычно жидкий пропан), сильно варьируется и составляет от 2 до 5 долларов США за галлон.
Однако стоимость топлива, используемого для двухтопливных лифтов (обычно жидкий пропан), сильно варьируется и составляет от 2 до 5 долларов США за галлон.
Подъемники с гибридным приводом
В лифтахс гибридным приводом используется комбинация технологий от двух разных типов источников энергии (обычно электрических и дизельных).В зависимости от типа гибридной модели, т. Е. Параллельной или последовательной, один или оба источника энергии могут приводить в действие лифт, или двигатель внутреннего сгорания действует как генератор зарядки для аккумуляторов лифта, которые обеспечивают питание большинства функций лифта, соответственно. В то время как серийные модели менее дороги и имеют более компактную конструкцию, чем параллельные модели, параллельные модели могут производить большую мощность и обеспечивать большую гибкость и безопасность благодаря резервированию мощности.
В целом, модели гибридных лифтов способны работать в течение длительного времени и в тяжелых условиях и подходят как для внутреннего, так и для наружного применения.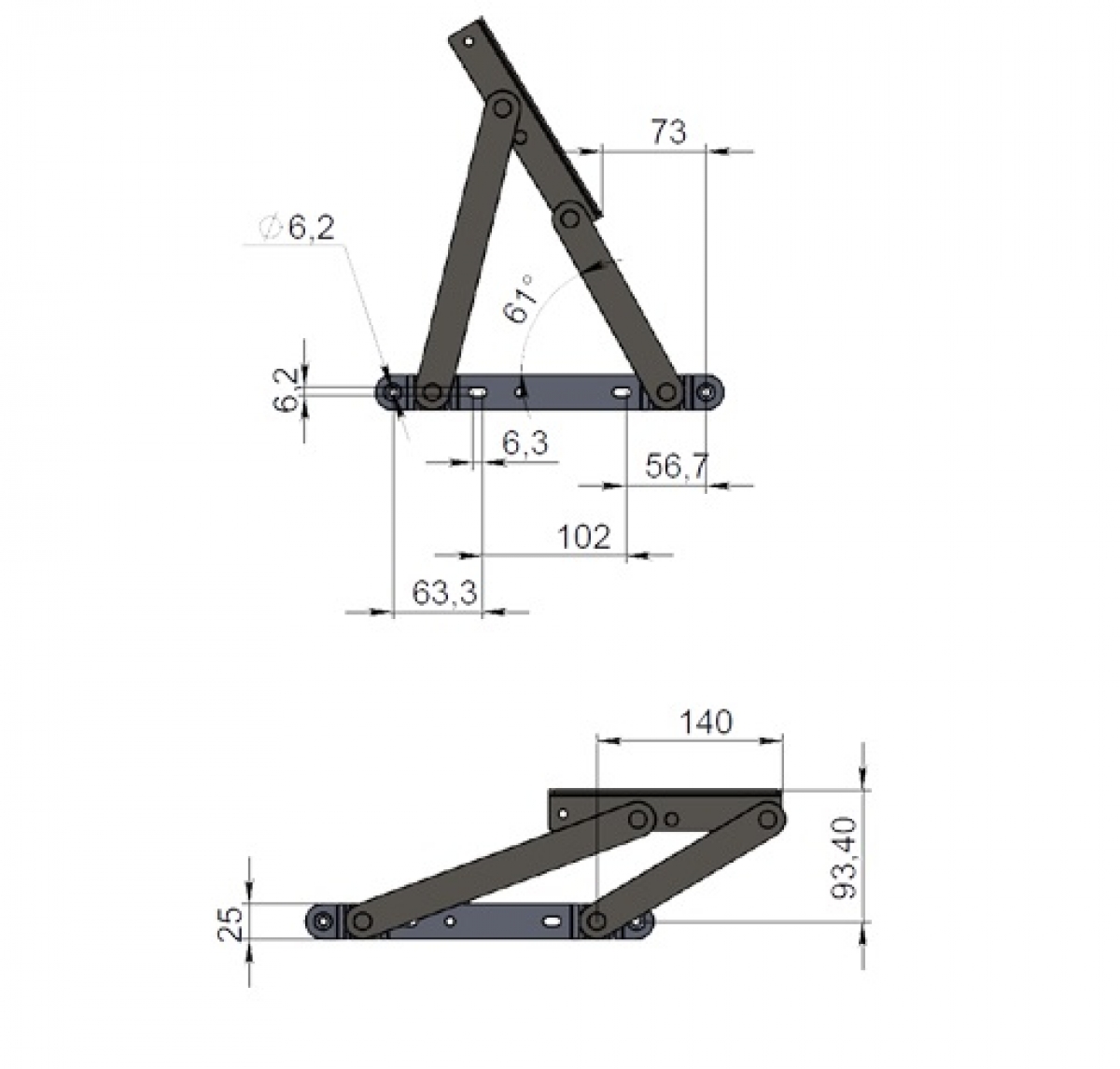 Возможность переключения на питание только от электричества обеспечивает большую гибкость условий эксплуатации, особенно для внутреннего применения, где необходимо ограничить выбросы выхлопных газов, и для наружного применения, где труднодоступны заправочные станции. Однако эти преимущества имеют свою цену, поскольку лифты с гибридным приводом обычно дороже, чем сопоставимые модели с дизельным или газовым двигателем.
Возможность переключения на питание только от электричества обеспечивает большую гибкость условий эксплуатации, особенно для внутреннего применения, где необходимо ограничить выбросы выхлопных газов, и для наружного применения, где труднодоступны заправочные станции. Однако эти преимущества имеют свою цену, поскольку лифты с гибридным приводом обычно дороже, чем сопоставимые модели с дизельным или газовым двигателем.
Источник питания | Преимущества | Недостатки |
Электрический |
|
|
Дизель |
|
|
Газ | – | – |
Бензин |
|
|
Природный газ |
|
|
Пропан |
|
|
Двухтопливный |
|
|
Гибрид |
|
|
 с., чем у дизеля
с., чем у дизеляПодвижность лифта
В зависимости от используемого типа и технических характеристик подъемного устройства, лифты доступны в стационарных или мобильных моделях.
Стационарные модели могут быть зафиксированы на месте, например, в случае док-лифтов или подъемников для людей с ограниченными возможностями, или переносными, но могут работать в пределах одного места на протяжении всего подъемного приложения. В последнем случае подъемники не являются самодвижущимися и требуют вспомогательного транспортного средства для буксировки или буксировки на место, например подъемников, установленных на прицепах или грузовиках. Преимуществами стационарных лифтов являются отсутствие затрат на топливо и более компактная конструкция (и то, и другое из-за того, что они не имеют собственного транспортного двигателя).Некоторые модели также включают гидравлические опоры, которые помогают при настройке и выравнивании.
В последнем случае подъемники не являются самодвижущимися и требуют вспомогательного транспортного средства для буксировки или буксировки на место, например подъемников, установленных на прицепах или грузовиках. Преимуществами стационарных лифтов являются отсутствие затрат на топливо и более компактная конструкция (и то, и другое из-за того, что они не имеют собственного транспортного двигателя).Некоторые модели также включают гидравлические опоры, которые помогают при настройке и выравнивании.
Мобильные подъемники являются самоходными, что позволяет операторам при необходимости регулировать свое положение. Они доступны с несколькими типами приводных систем, в том числе:
- 2-х колесный
- Полный привод
- Гусеничный привод
Привод на 2 колеса : Подъемники с приводом на 2 колеса более компактны и обычно используются в помещениях. Однако, оснащенные колесами для пересеченной местности, они также могут использоваться на открытом воздухе. Эти лифты имеют ограниченную максимальную грузоподъемность, дальность действия и маневренность, но они компенсируют эти недостатки более быстрым временем зарядки или дозаправки и увеличенным временем работы.
Эти лифты имеют ограниченную максимальную грузоподъемность, дальность действия и маневренность, но они компенсируют эти недостатки более быстрым временем зарядки или дозаправки и увеличенным временем работы.
4-х колесный привод : полноприводные лифты являются стандартом для большинства промышленных и строительных площадок, поскольку они предлагают большую площадь платформы, большую грузоподъемность и больший диапазон выдвижения. К другим конструктивным характеристикам полноприводных лифтов относятся улучшенный контроль тяги, возможности выравнивания и более высокие скорости подъема.
Track Drive : В подъемниках с гусеничным приводом используется комбинация технологий стационарных и мобильных подъемников, то есть их гидравлическое выравнивание и самоходные возможности, соответственно. Доступные с безрезиновыми колесами или колесами для пересеченной местности и полным приводом, эти подъемники подходят как для внутреннего, так и для наружного применения.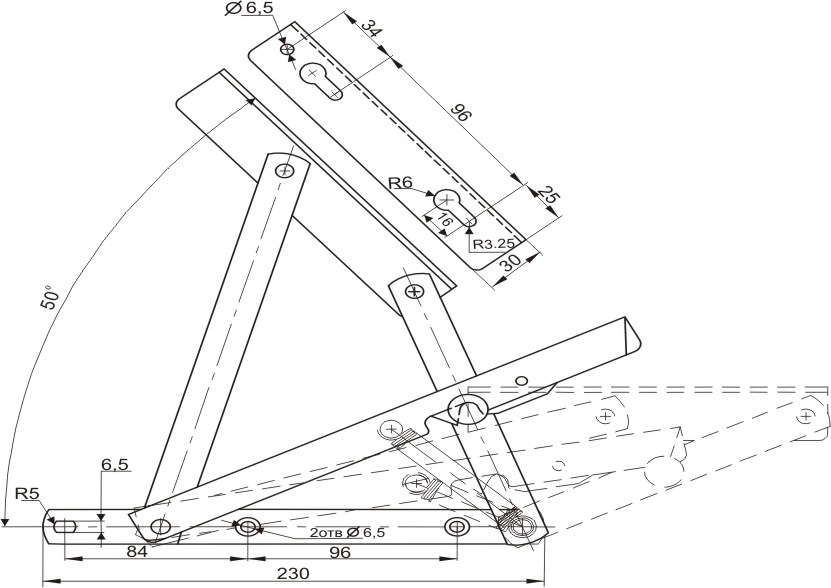
Изображение предоставлено: Эдуард Валентинов / Shutterstock.com
Маневренность подъемника
Существует несколько вариантов конструкции лифтов, которые могут улучшить их маневренность во время подъемных операций, особенно для ограниченного доступа или ограниченного пространства.Наиболее часто используются шарнирно-сочлененная и телескопическая стрела.
Состоящий из нескольких шарнирно-сочлененных секций, шарнирно-сочлененные рычаги стрелы могут сгибаться и преодолевать препятствия и препятствия, поднимая платформу или объект в нужное положение. Кроме того, шарнирно-сочлененные подъемники обычно включают в себя поворотный элемент, обеспечивающий полное вращение подъемного рычага. Вместе эти два элемента конструкции позволяют этим типам лифтов предлагать широкий диапазон рабочей высоты и высокую степень гибкости.
Подъемные автовышки на шарнирно-сочлененных подъемниках. Кредит изображения: SteveWoods / Shutterstock.![]() com
com
Как следует из названия, телескопические стрелы выдвигаются во многом как телескопы, с несколькими секциями, которые выдвигаются и убираются друг в друга. В отличие от шарнирных рычагов, телескопические рычаги выдвигаются прямо, что ограничивает их способность поднимать платформу или объект, если путь затруднен или ограничен иным образом. Кроме того, подъемники с телескопическими рычагами обычно имеют меньшие платформы, чем подъемники с шарнирно-сочлененными рычагами.Тем не менее, большинство телескопических моделей по-прежнему доступны с возможностью полного вращения, а также предлагают большие удлинители, чем другие типы подъемников.
Подъемник с телескопической стрелой с выдвинутой стрелой и повышенной подъемной платформой.Кредит изображения: Ллойд Полсон / Shutterstock.com
Другие конструктивные характеристики лифта
Помимо конструктивных характеристик, упомянутых выше, есть несколько других вариантов, которые отраслевой специалист или агент по закупкам могут рассмотреть при проектировании и выборе подъемника для своего конкретного подъемного оборудования. Некоторые из других доступных вариантов конструкции включают возможность наклона для повышения маневренности и гибкости, поручни для безопасности оператора, гидравлические опоры для дополнительной устойчивости и немаркированные шины или шины для пересеченной местности для использования в помещении и на улице соответственно.
Некоторые из других доступных вариантов конструкции включают возможность наклона для повышения маневренности и гибкости, поручни для безопасности оператора, гидравлические опоры для дополнительной устойчивости и немаркированные шины или шины для пересеченной местности для использования в помещении и на улице соответственно.
Типы подъемников
Имеется несколько различных вариантов лифтов с указанными выше конструктивными характеристиками. Некоторые из наиболее распространенных типов, используемых для жилых, коммерческих и промышленных приложений, включают:
- Подъемники стреловые
- Подъемники вертикальные мачтовые
- Подъемники ножничные
- Вилочные погрузчики
- Подъемники вертикальные платформенные
Подъемники стрелы
Стреловые подъемники — это подъемники, используемые для подъема и перемещения персонала на нужную высоту и положение на рабочей площадке.Состоящие из одного или нескольких компонентов выдвижной стрелы с прикрепленной подъемной платформой и исполнительными компонентами (которые обеспечивают необходимую движущую силу для шарнирного сочленения или выдвижения компонентов), эти подъемники предлагают одни из самых больших возможностей вертикального и горизонтального перемещения с максимальным диапазоном выдвижения. от 20 до 100+ футов. Основные типы подъемников со стрелой включают шарнирно-сочлененные (также известные как шарнирные) и телескопические подъемники со стрелой с возможностью стационарного или самоходного подъема.Некоторые из примеров доступных стреловых подъемников включают в себя стреловые подъемники, установленные на прицепах или грузовиках, и сборщики вишни (также называемые автовышками).
от 20 до 100+ футов. Основные типы подъемников со стрелой включают шарнирно-сочлененные (также известные как шарнирные) и телескопические подъемники со стрелой с возможностью стационарного или самоходного подъема.Некоторые из примеров доступных стреловых подъемников включают в себя стреловые подъемники, установленные на прицепах или грузовиках, и сборщики вишни (также называемые автовышками).
Некоторые из типичных применений стреловых подъемников включают промышленные и строительные площадки, а также сельское хозяйство, ландшафтный дизайн, коммунальные услуги, а также работы по техническому обслуживанию и установке.
Вертикальные мачтовые подъемники
В отличие от стреловых подъемников, вертикальные мачтовые подъемники (также называемые вертикальными подъемниками или подъемниками для персонала) представляют собой подъемники, которые обычно способны перемещаться только по вертикали и не допускают значительного горизонтального расширения.Хотя, в зависимости от модели, эти подъемники могут иметь возможность самодвижения, что позволяет операторам регулировать положение подъемника на земле и, следовательно, относительное положение платформы. Типичная конструкция включает подъемную платформу, прикрепленную к одной вертикальной телескопической стреле (т. Е. Мачту), и исполнительные компоненты, но некоторые модели могут также включать в себя компонент шарнирной стрелы.
Типичная конструкция включает подъемную платформу, прикрепленную к одной вертикальной телескопической стреле (т. Е. Мачту), и исполнительные компоненты, но некоторые модели могут также включать в себя компонент шарнирной стрелы.
Вертикальные мачтовые подъемники имеют более легкую конструкцию, чем другие типы подъемников, что обеспечивает большую маневренность, но также ограничивает максимальный размер рабочей платформы и грузоподъемность.Эти лифты подходят для использования внутри помещений и в ограниченном пространстве, где требуется только вертикальное расширение, например, для складирования, управления запасами, а также для обслуживания и установки.
Иллюстрация вертикального мачтового подъемника с элементом шарнирного рычага.Изображение предоставлено: Andrio / Shutterstock.com
Ножничные подъемники
Как и вертикальные мачтовые подъемники, ножничные подъемники могут перемещаться только по вертикали. В этих подъемниках используется пантографический механизм, который удлиняется при приложении внутренней силы к сторонам механизма и укорачивается при приложении внешней силы. По мере того, как механизм удлиняется и укорачивается, он прикладывает восходящую силу к прикрепленной подвесной платформе, заставляя платформу подниматься и опускаться соответственно. В зависимости от модели используются гидравлические, пневматические или механические приводные компоненты, обеспечивающие движущую силу для удлинения и укорачивания пантографического механизма. Другие варианты конструкции, доступные для ножничных подъемников, включают элементы управления безопасностью и перила, возможности самодвижения, а также шарнирные, наклонные или вращающиеся платформы.
По мере того, как механизм удлиняется и укорачивается, он прикладывает восходящую силу к прикрепленной подвесной платформе, заставляя платформу подниматься и опускаться соответственно. В зависимости от модели используются гидравлические, пневматические или механические приводные компоненты, обеспечивающие движущую силу для удлинения и укорачивания пантографического механизма. Другие варианты конструкции, доступные для ножничных подъемников, включают элементы управления безопасностью и перила, возможности самодвижения, а также шарнирные, наклонные или вращающиеся платформы.
обычно обладают высокой грузоподъемностью и используют гораздо большую платформу, чем другие типы подъемников, что позволяет одновременно перемещать и размещать на рабочей площадке несколько или тяжелых предметов и персонала. Однако, поскольку эти подъемники ограничены вертикальным перемещением, они должны быть расположены непосредственно под желаемой точкой использования на рабочей площадке, что может быть затруднительно на пересеченной местности или в районах с ограниченным пространством.![]() Подходящие для тяжелых и тяжелых подъемных операций, типичные применения ножничных подъемников включают строительство, техническое обслуживание, ремонт и установку.Хотя ножничные подъемники могут быть с приводом от двигателя, они также доступны в стационарном и полупостоянном исполнении.
Подходящие для тяжелых и тяжелых подъемных операций, типичные применения ножничных подъемников включают строительство, техническое обслуживание, ремонт и установку.Хотя ножничные подъемники могут быть с приводом от двигателя, они также доступны в стационарном и полупостоянном исполнении.
Изображение предоставлено: Andrio / Shutterstock.com
Вилочные погрузчики
Вилочные погрузчики, также называемые вилочными погрузчиками и подъемниками для поддонов (из-за того, что они обычно используются при перемещении поддонов), подходят для подъема предметов с пола на нужную высоту и положение для работы, хранения, транспортировки или загрузки и разгрузки. .В дополнение к компонентам вилки и каретки (т. Е. Рамы, к которой крепятся вилы), в типовой конструкции вилочного погрузчика используются подъемные механизмы, аналогичные подъемным механизмам ранее упомянутых типов, например стрелы вилочного погрузчика или вертикальные мачты.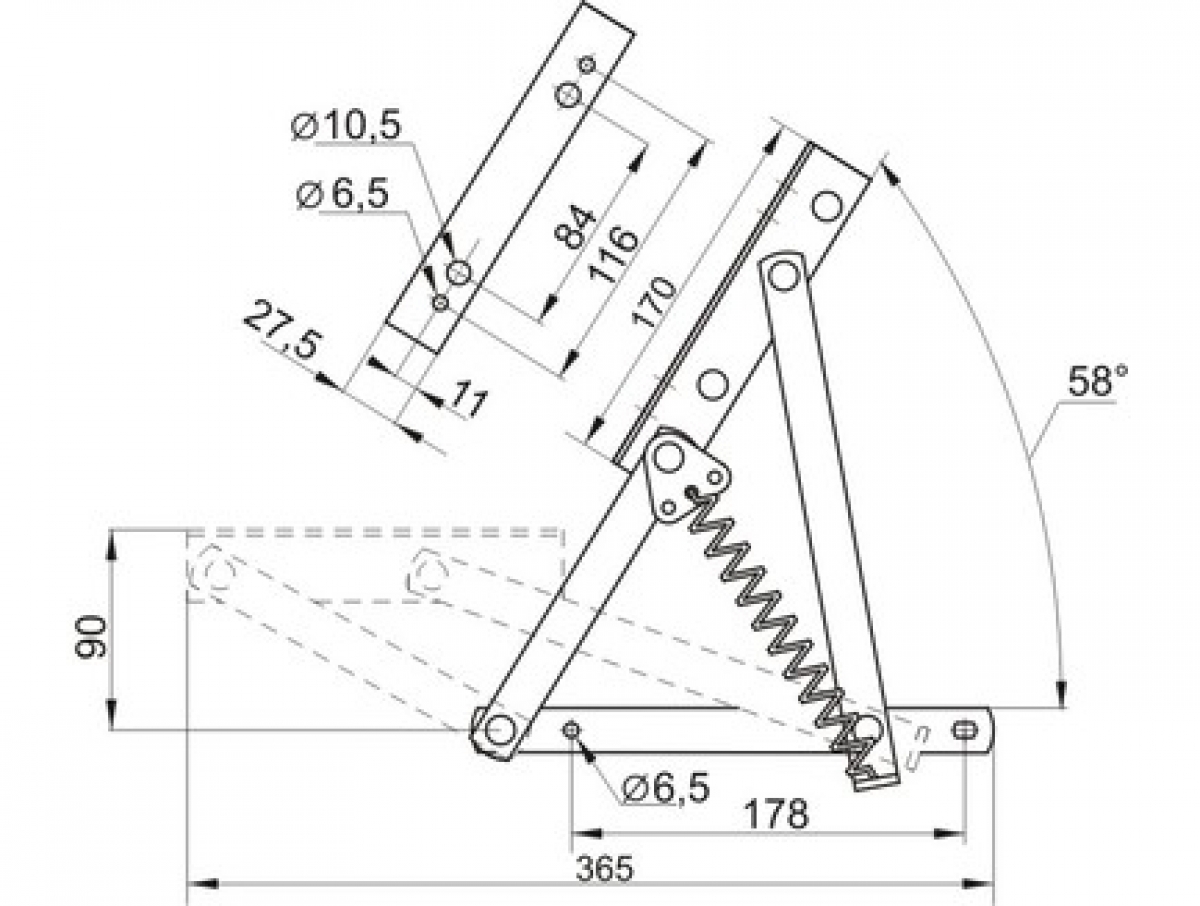 В зависимости от модели, механические, пневматические или гидравлические приводные компоненты приводят в действие подъемные возможности вилочного погрузчика, которые могут быть ограничены вертикальным перемещением или включать как вертикальное перемещение, так и горизонтальное удлинение. Дополнительные конструктивные особенности, доступные для вилочных погрузчиков, включают ручной или моторизованный привод, уравновешивание и интеграцию других принадлежностей для вилочных погрузчиков.
В зависимости от модели, механические, пневматические или гидравлические приводные компоненты приводят в действие подъемные возможности вилочного погрузчика, которые могут быть ограничены вертикальным перемещением или включать как вертикальное перемещение, так и горизонтальное удлинение. Дополнительные конструктивные особенности, доступные для вилочных погрузчиков, включают ручной или моторизованный привод, уравновешивание и интеграцию других принадлежностей для вилочных погрузчиков.
Согласно определению Ассоциации промышленных грузовиков (ITA), существует восемь классификаций промышленных погрузчиков (включая вилочные погрузчики) от класса I до класса VIII. Каждый класс является представителем определенного типа погрузчика и его характеристик. Например, трехколесный вилочный погрузчик с электрическим приводом классифицируется как класс I, а вилочный погрузчик с газовым приводом с пневматическими шинами и сидячей кабиной оператора классифицируется как класс V. Некоторые из других типов доступных вилочных погрузчиков включают мобильные вилочные погрузчики и вилочные погрузчики для пересеченной местности.
В таблице 3 ниже приводится краткое описание различных классов имеющихся погрузчиков.
Таблица 3 — Классификация промышленных погрузчиковКласс | Краткое описание | Характеристики |
I | Электродвигатель, Rider Trucks |
|
II | Электродвигатель, узкопроходные грузовые автомобили |
|
III | Электродвигатель, ручные или грузовые автомобили с водителем |
|
IV | Двигатель внутреннего сгорания, грузовые автомобили с твердой / амортизирующей шиной |
|
В | Двигатель внутреннего сгорания, грузовые автомобили с пневматическими шинами |
|
VI | Тягачи с электрическими двигателями или двигателями внутреннего сгорания |
|
VII | Вилочные погрузчики повышенной проходимости |
|
VIII | Перевозчики персонала и грузовых автомобилей с электрическими / внутренними двигателями |
|

Кредит изображения: lpajoel / Shutterstock.com
Вертикальные подъемники платформы
В подъемниках с вертикальной платформой используется основание или компонент платформы, прикрепленный к одной или нескольким вертикальным мачтам (или стойкам). Когда механические, пневматические или гидравлические приводные компоненты включаются и отключаются, платформа поднимается и опускается. Некоторые примеры этих типов подъемников включают док-подъемники, подъемники задней двери грузовиков, сценические подъемники и подъемники для людей с ограниченными возможностями.
Док-подъемники, ворота грузовых подъемников, сценические подъемники и подъемники для людей с ограниченными возможностями предлагают аналогичные функции для различных приложений.Каждый из этих лифтов способен обеспечивать вертикальное перемещение — то есть поднимать или опускать — объекты, людей или оборудование, чтобы поднять их на нужную высоту для загрузки или разгрузки. Как правило, эти лифты монтируются на постоянной или полупостоянной основе, либо включаются в качестве приспособления или приспособления здания (в случае док-лифтов, сценических подъемников и лифтов для доступа) или прикрепляются как компонент транспортного средства или грузовика ( в случае лифтовых ворот).
Приложения для вертикальных платформенных подъемников обычно имеют меньшие требования к вертикальному подъему, чем приложения для других типов подъемников, поскольку вертикальные платформенные подъемники используются только для того, чтобы поднять что-то либо на уровень земли, либо на слегка приподнятую поверхность, такую как платформа грузовика или погрузочный док.
Подъемник пустой погрузочной платформы.Изображение предоставлено: Джон Аббейт / Shutterstock.com
Дополнительные типы подъемников
Лифтыиспользуются в различных промышленных, коммерческих и жилых помещениях. Следовательно, доступно несколько вариантов подъемников, каждый из которых соответствует требованиям и спецификациям конкретного приложения. Помимо типов, уже упомянутых выше, доступны другие типы, включая мезонинные подъемники, двухстоечные и четырехстоечные автомобильные подъемники и столы ножничных подъемников.
Рекомендации по выбору лифта
Несмотря на то, что существует большое разнообразие подъемников, пригодность каждого типа (и его конструкции) для подъема и опускания объекта, человека или оборудования зависит от технических характеристик и требований приложения. Эти факторы во многом определяют оптимальную конструкцию подъемника.
Эти факторы во многом определяют оптимальную конструкцию подъемника.
Некоторые из факторов, которые профессионалы отрасли должны учитывать при определении или выборе подъемника, включают:
- Приложение
- Размер платформы
- Номинальная грузоподъемность
- Ход
- Подъемное движение
- Аттестация персонала
- Стоимость жизненного цикла
Применение : Предполагаемое применение и условия окружающей среды влияют на оптимальный тип и конструкцию лифта и его компонентов.Например, на неровной поверхности или в условиях пересеченной местности в конструкцию подъемника может потребоваться использование гидравлических выносных опор или колес для пересеченной местности для обеспечения устойчивости. В таблицах 1 и 2 также перечислены некоторые аспекты применения и экологические проблемы, связанные с каждой конструктивной характеристикой лифта. Некоторые примеры из этих таблиц:
- Механические подъемники могут не подходить для работы с легковоспламеняющимися материалами из-за риска пожара или взрыва
- Лифты с электроприводом могут не подходить для работы на открытом воздухе или во влажной среде из-за риска повреждения электрических компонентов
- Лифты с приводом от двигателя могут не подходить для использования внутри помещений из-за выбросов выхлопных газов
Размер платформы : Размер объекта или оборудования, а также требования к персоналу или рабочему пространству определяют размеры — i. е., длина и ширина — элемента платформы лифта.
е., длина и ширина — элемента платформы лифта.
Номинальная грузоподъемность : Требования к общему весу объектов, оборудования и персонала определяют необходимую грузоподъемность лифта. В лифтах номинальная грузоподъемность или грузоподъемность — это максимальная нагрузка (т. Е. Вес), определенная производителем, которая безопасно выдерживается конкретным лифтом. Номинальная грузоподъемность определяется на основе конкретного центра нагрузки, что означает, что груз безопасно выдерживает подъемник при условии, что груз расположен и распределяется на подъемной платформе, как указано производителем.
Ход : Требуемая высота подъема и рабочая высота подъемного устройства — то есть, на какую высоту необходимо поднять объект или человека — определяют необходимую длину хода подъемника. В лифтах длина хода — это расстояние, пройденное исполнительными компонентами от полностью закрытого до полностью открытого, которое коррелирует с расстоянием, пройденным подъемной платформой от полностью опущенного до полностью поднятого, соответственно. Таким образом, длина хода определяет максимальную высоту, на которую подъемник может поднять объект или человека.
Таким образом, длина хода определяет максимальную высоту, на которую подъемник может поднять объект или человека.
Механизм : Требования к движению, мобильности и маневренности подъемного устройства определяют некоторые конструктивные характеристики подъемника. Например, агенту по закупкам и закупкам необходимо решить, требуется ли для подъемного устройства только вертикальное перемещение или одновременно вертикальное и горизонтальное перемещение. Если подъемник будет использоваться как для вертикального, так и для горизонтального выдвижения, необходимо учитывать при проектировании максимально возможное горизонтальное положение груза относительно основания подъемника, поскольку расположение груза влияет на грузоподъемность и устойчивость подъемника.Кроме того, если приложение требует самоходных и самопозиционирующихся возможностей, тогда может потребоваться интеграция системы привода, и если приложение требует подъема оборудования или персонала вокруг препятствий и препятствий и над ними, тогда для подъемника могут потребоваться шарнирные стрелы. .
.
Аттестация персонала : Если определенные подъемники, включая канатные подъемники и ножничные подъемники, используются на рабочем месте, то, согласно требованиям OSHA, работники, управляющие ими, должны пройти соответствующее обучение и сертификацию оператора подъемника.В обучении подробно описываются правильные методы использования, перемещения, эксплуатации, технического обслуживания и ремонта подъемника, чтобы предотвратить несчастные случаи на рабочем месте или травмы оператора.
Стоимость жизненного цикла : Стоимость лифта включает не только начальную цену оборудования, но также затраты на установку (если применимо), техническое обслуживание, ремонт и обучение операторов в течение всего срока службы лифта. Несмотря на то, что необходимо выбрать подъемник, который соответствует требованиям подъемного оборудования, также важно иметь в виду общие затраты на выбранный подъемник, чтобы лучше определить долгосрочную стоимость инвестиций. Компании, у которых нет бюджета, необходимого для крупных первоначальных инвестиций, или которым требуется круглогодичное использование лифта, имеют возможность отказаться от покупки лифта и вместо этого могут арендовать или арендовать его по мере необходимости.
Компании, у которых нет бюджета, необходимого для крупных первоначальных инвестиций, или которым требуется круглогодичное использование лифта, имеют возможность отказаться от покупки лифта и вместо этого могут арендовать или арендовать его по мере необходимости.
Применение лифтов
Ножничные и шарнирно-сочлененные подъемники промышленного назначения.Изображение предоставлено: anmbph / Shutterstock.com
Лифты находят широкое применение в жилых, коммерческих и промышленных помещениях. Доступны несколько типов и вариантов подъемников, характеристики каждого из которых делают его подходящим для требований и спецификаций конкретного применения.Подъемники, особенно канатные, обычно используются в промышленности, особенно в строительстве, производстве и транспортировке материалов. Некоторые подъемники, такие как ножничные подъемники, вилочные погрузчики и док-подъемники, находят применение как в промышленных, так и в коммерческих средах, в то время как другие подъемники, такие как подъемники для людей с ограниченными возможностями, используются в более жилых помещениях.
В таблице 4 ниже указаны некоторые из общих отраслей и областей применения ранее упомянутых типов лифтов.
Таблица 4 — Отрасли и области применения лифтов по типамТип подъемника | Общие отрасли промышленности и приложения |
Подъемники стреловые |
|
Подъемники вертикальные мачтовые |
|
Подъемники ножничные |
|
Вилочные погрузчики |
|
Подъемники вертикальные платформенные | – |
Док-подъемники |
|
Подъемники задней двери грузовика |
|
Сценические подъемники |
|
Лифты для людей с ограниченными возможностями |
|
Мезонинные лифты |
|
Двухстоечные / четырехстоечные подъемники | |
Столы ножничного подъемника |
|
Резюме
Это руководство дает общее представление о пневматических и гидравлических подъемниках, доступных конструкциях и типах, их применениях и особенностях использования.
Для получения дополнительной информации о сопутствующих продуктах обратитесь к руководствам и официальным документам Thomas или посетите платформу Thomas Supplier Discovery Platform, где вы найдете информацию о более чем 500 000 коммерческих и промышленных поставщиков.
Источники
- https://homesteady.com/list-5814525-types-scissor-lifts.html
- https://sciencetrends.com/the-formula-for-work-physics-equation-with-examples/
- https://www.liftandaccess.com/article/hello-hybrid-powered-aerial-lifts
- https: // securityresourcesblog.files.wordpress.com/2014/11/aerial-and-scissors-lift-training-program.pdf
- https://www.osha.gov/SLTC/etools/pit/forklift/types/classes.html
Прочие гидравлические изделия
Больше из раздела «Обработка материалов»
1.3 Подъемные механизмы
1.3 Подъемные механизмы 1.3.1 Подъемные механизмы в Снежных событиях с эффектом озера / океана
- Орографический подъемник
- Фрикционное схождение
- Тепловое схождение
После усиления неустойчивости пограничного слоя над водой за счет увлажнения
и согревание, несколько мезомасштабных механических подъемных механизмов могут помочь
запускать и / или усиливать конвективные процессы. Эти механизмы включают
рельеф местности или орографический подъем, фрикционное сближение и тепловое сближение.
Хотя такие подъемные механизмы строго не требуются для возникновения
событий, связанных с воздействием озера / океана, они наблюдаются в большинстве случаев. Кроме того,
подъем синоптического масштаба перед мигрирующим коротковолновым желобом в средней тропосфере
может также добавить достаточный импульс конвективному процессу.
Эти механизмы включают
рельеф местности или орографический подъем, фрикционное сближение и тепловое сближение.
Хотя такие подъемные механизмы строго не требуются для возникновения
событий, связанных с воздействием озера / океана, они наблюдаются в большинстве случаев. Кроме того,
подъем синоптического масштаба перед мигрирующим коротковолновым желобом в средней тропосфере
может также добавить достаточный импульс конвективному процессу.
1.3.2 Орографический Подъемник
Когда воздух движется с поверхности воды над сушей, некоторый орографический подъем
часто участвует.Однако в некоторых местах рельеф играет важную роль.
эффект озера / океана производство снега. Для Великих озер это будет включать
такие места, как полуостров Кивино в Мичигане, полуостров Брюс
на юге Онтарио — на плато Таг-Хилл и Аллегени в северной части штата Нью-Йорк;
для Большого Соленого озера — хребет Уосатч; для Атлантической Канады, Длинная
Горы хребта в Ньюфаундленде и нагорье Кейп-Бретон в Новой Шотландии;
и для попрошайничества на Аляске — Прибрежные горы. По оценкам, ежегодно
снегопад увеличивается на 65 см на каждые 100 метров подъема с подветренной стороны Великого
Озера.
По оценкам, ежегодно
снегопад увеличивается на 65 см на каждые 100 метров подъема с подветренной стороны Великого
Озера.
Великие озера
Канадские морские перевозки
Большое Соленое озеро
Alaskan Panhandle
1.3.3 Трение Схождение
При движении над водой поверхностный ветер испытывает очень небольшое сопротивление трения,
поэтому скорость ветра относительно выше, чем над землей, где
холмы, растительность и даже большие здания могут уменьшить скорость ветра.Как результат,
быстро движущийся воздух над водой превращается в медленно движущийся воздух над сушей
создание зоны фрикционного сближения и подъемной силы у подветренного берега.
Противоположный эффект происходит вдоль наветренного берега, в результате чего поверхность
фрикционные расхождения и просадки. Кроме того, ветры над сушей
замедляется в большей степени из-за трения, что приводит к большему отклонению влево
через изобары к более низкому давлению, чем то, что происходит над водой. Следовательно, по отношению к преобладающему ветровому потоку на малых высотах фрикционное сближение
предпочитается около правой береговой линии, и это может быть доминирующим фактором
в создании единой зоны конвекции у берега. Со временем эта группа
может распространяться вглубь суши от исходной зоны конвергенции.
Следовательно, по отношению к преобладающему ветровому потоку на малых высотах фрикционное сближение
предпочитается около правой береговой линии, и это может быть доминирующим фактором
в создании единой зоны конвекции у берега. Со временем эта группа
может распространяться вглубь суши от исходной зоны конвергенции.
1.3.4 Тепловой Схождение
Дополнительный источник конвергенции и подъемной силы создается за счет земли бриз, создаваемый температурным градиентом между озером и прилегающей землей области.Относительно теплая и влажная среда над водой способствует к образованию «мезолока», усиливающего конвергенцию прохладных наземных бризов над водоемом. Прохладный ветерок помогает поднимать неустойчивый воздух над водой, и этот подъем может быть особенно имеет значение в тех случаях, когда наземные бризы с противоположных берегов сходятся в близость мезолуки.
(нажмите, чтобы просмотреть анимацию в отдельном окне браузера — ~ 1 мб)
Иногда эта полоса может располагаться около береговой линии, как и
расположение полосы, созданной фрикционным сближением, когда более крупномасштабная
фоновый поток приближает зону конвергенции к подветренному берегу. Это говорит о том, что в некоторых случаях несколько механизмов конвергенции могут
работайте сообща, чтобы улучшить подъем.
Это говорит о том, что в некоторых случаях несколько механизмов конвергенции могут
работайте сообща, чтобы улучшить подъем.
(щелкните для просмотра анимации в отдельном окне браузера — ~ 28 кб)
Когда фоновый поток относительно слабый, форма береговой линии может повлиять на форму возникающей конвекции. Сухой ветерок над глубокая бухта или чашеобразная часть озера может создать озерный мезовихрь, в то время как более мелкая бухта может просто фокусировать тепловую конвергенцию, производящую доминирующая полоса в многополосном сценарии.
Проектирование и анализ рулевых и подъемных механизмов для шасси лесохозяйственной машины
Из-за особой топографической структуры рабочая среда в лесу требует шасси автомобиля, которое может хорошо адаптироваться к сложным условиям местности. В этой статье описываются ключевые компоненты шасси, которое было разработано для адаптации к сложной местности.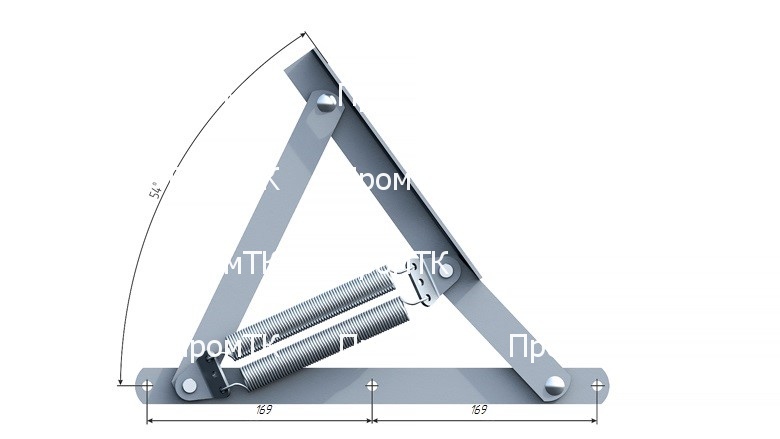 Детально анализируются принцип работы и конструкция рулевого управления и подъемной конструкции, и выполняется проверка их функций.Рулевой механизм имеет три степени свободы, а первая степень свободы снижает наклон кузова на 30 °. Вторая степень свободы позволяет увеличить угол поворота шасси до 47 °, уменьшая радиус поворота шасси. Третья степень свободы снижает угол опрокидывания кузова на 30 °. Весь механизм рулевого управления улучшает плавность хода и устойчивость шасси. С помощью подъемного механизма опоры колес поднимаются так, чтобы шасси могло пройти предельную высоту 187 мм, а опоры колес опускаются, чтобы поднять центр тяжести шасси транспортного средства на 244 мм.Подъемный механизм в целом значительно улучшает проходимость машины по лесной местности. Размер уменьшен на 10% по сравнению с другими конструкциями, а высота подъема и сопротивление препятствиям улучшены на 12,7%.
Детально анализируются принцип работы и конструкция рулевого управления и подъемной конструкции, и выполняется проверка их функций.Рулевой механизм имеет три степени свободы, а первая степень свободы снижает наклон кузова на 30 °. Вторая степень свободы позволяет увеличить угол поворота шасси до 47 °, уменьшая радиус поворота шасси. Третья степень свободы снижает угол опрокидывания кузова на 30 °. Весь механизм рулевого управления улучшает плавность хода и устойчивость шасси. С помощью подъемного механизма опоры колес поднимаются так, чтобы шасси могло пройти предельную высоту 187 мм, а опоры колес опускаются, чтобы поднять центр тяжести шасси транспортного средства на 244 мм.Подъемный механизм в целом значительно улучшает проходимость машины по лесной местности. Размер уменьшен на 10% по сравнению с другими конструкциями, а высота подъема и сопротивление препятствиям улучшены на 12,7%.
1. Введение
Лесозаготовительные машины, используемые для выполнения лесных задач, таких как лесозаготовка, разведка, заготовка и транспортировка бревен, имеют ограничения. Эти машины должны перемещаться по пересеченной местности леса [1, 2]. Однако сегодня самой большой проблемой для лесозаготовительных машин является плохое качество лесных дорог.Следовательно, необходимо разработать шасси для лесного хозяйства, адаптированное к сложным условиям местности [3–5]. На текущем этапе исследований лесохозяйственные машины базируются на следующих двух типах шасси: гусеничном или колесном [6]. Эдлунд и др. спроектировать гусеничное шасси особого типа с новой тележкой [7]. Это шасси обладает превосходной проходимостью по сравнению с обычными колесными автомобилями, но при этом у них плохая маневренность, особенно плохие характеристики рулевого управления. Гусеничный всенаправленный аппарат был разработан Чжаном и Хуангом [8].Автомобиль обладает превосходной эффективностью рулевого управления и способностью двигаться во всех направлениях на неровной местности. Ким и др. Представили исследование конструкции машины для системы гусеничного транспортного средства трансформируемой формы.
Эти машины должны перемещаться по пересеченной местности леса [1, 2]. Однако сегодня самой большой проблемой для лесозаготовительных машин является плохое качество лесных дорог.Следовательно, необходимо разработать шасси для лесного хозяйства, адаптированное к сложным условиям местности [3–5]. На текущем этапе исследований лесохозяйственные машины базируются на следующих двух типах шасси: гусеничном или колесном [6]. Эдлунд и др. спроектировать гусеничное шасси особого типа с новой тележкой [7]. Это шасси обладает превосходной проходимостью по сравнению с обычными колесными автомобилями, но при этом у них плохая маневренность, особенно плохие характеристики рулевого управления. Гусеничный всенаправленный аппарат был разработан Чжаном и Хуангом [8].Автомобиль обладает превосходной эффективностью рулевого управления и способностью двигаться во всех направлениях на неровной местности. Ким и др. Представили исследование конструкции машины для системы гусеничного транспортного средства трансформируемой формы. [9]. Использование разнообразных форм обеспечивало повышенную способность преодолевать препятствия. Однако автомобили с гусеничным шасси наносят серьезный ущерб почве и окружающим растениям в лесах. Робот с подъемной стрелой и шестью ногами был представлен Сунь и Лю [10]. Этот робот может активно преодолевать препятствия на лесных дорогах.Однако этот робот имеет низкую эффективность при преодолении препятствий. Yao et al. разработать инновационный вездеход с колесами переменного диаметра [11]. Этот автомобиль может различаться по диаметру и преодолевать более высокие препятствия по сравнению со стандартными колесами. Но сложная конструкция колес связана с некоторыми рисками. Ге и Ван предложили модель четырехногого эксцентрикового колесного шасси, которая показала отличные характеристики при преодолении препятствий [12]. Но комфорт вождения у машины неутешительный.Таким образом, особенно важно спроектировать шасси для леса, которое сможет преодолеть проблемы леса и будет стабильно работать.
[9]. Использование разнообразных форм обеспечивало повышенную способность преодолевать препятствия. Однако автомобили с гусеничным шасси наносят серьезный ущерб почве и окружающим растениям в лесах. Робот с подъемной стрелой и шестью ногами был представлен Сунь и Лю [10]. Этот робот может активно преодолевать препятствия на лесных дорогах.Однако этот робот имеет низкую эффективность при преодолении препятствий. Yao et al. разработать инновационный вездеход с колесами переменного диаметра [11]. Этот автомобиль может различаться по диаметру и преодолевать более высокие препятствия по сравнению со стандартными колесами. Но сложная конструкция колес связана с некоторыми рисками. Ге и Ван предложили модель четырехногого эксцентрикового колесного шасси, которая показала отличные характеристики при преодолении препятствий [12]. Но комфорт вождения у машины неутешительный.Таким образом, особенно важно спроектировать шасси для леса, которое сможет преодолеть проблемы леса и будет стабильно работать. Это шасси должно иметь стабильную плавность движения, хорошую управляемость автомобиля и способность эффективно преодолевать препятствия.
Это шасси должно иметь стабильную плавность движения, хорошую управляемость автомобиля и способность эффективно преодолевать препятствия.
В целом мобильных роботов можно разделить на три типа: колесные, гусеничные и роботы на ногах [13]. Колесные роботы могут быстро двигаться и иметь хорошую устойчивость на ровной местности, но им трудно преодолевать препятствия на пересеченной местности.Гусеничные роботы могут лучше преодолевать препятствия и лучше адаптироваться к грунту на неструктурированном грунте, но их недостатком является высокое потребление энергии. Роботы с ножками обладают лучшими характеристиками передвижения по пересеченной местности, с недостатками низкой скорости и сложных механизмов и систем управления [14–16]. В настоящее время гибридный мобильный робот с колесной опорой стал центром исследований, поскольку многие преимущества колесных и ножных роботов могут быть объединены [17–19]. Гибридный робот с колесной опорой становится лучшим решением для адаптации к сложной среде местности и решения рабочих задач в неструктурированной среде [20]. Робот-колесо-нога преодолевает препятствие в трех ситуациях. Когда двусторонние колеса пересекают препятствие одновременно, передний и задний конец рамы образуют угол наклона. Когда одно боковое колесо пересекает препятствие, другое боковое колесо движется плавно, а левый и правый концы рамы образуют угол опрокидывания. Когда робот поднимается по склону, рама образует угол наклона [21, 22]. Конструкция с колесной опорой позволяет преодолевать три типа препятствий, а рама всегда проходит горизонтально.Колесо-ножной робот имеет хороший профиль дороги и способность преодолевать препятствия [23, 24].
Робот-колесо-нога преодолевает препятствие в трех ситуациях. Когда двусторонние колеса пересекают препятствие одновременно, передний и задний конец рамы образуют угол наклона. Когда одно боковое колесо пересекает препятствие, другое боковое колесо движется плавно, а левый и правый концы рамы образуют угол опрокидывания. Когда робот поднимается по склону, рама образует угол наклона [21, 22]. Конструкция с колесной опорой позволяет преодолевать три типа препятствий, а рама всегда проходит горизонтально.Колесо-ножной робот имеет хороший профиль дороги и способность преодолевать препятствия [23, 24].
Ключевые компоненты FC-3DOF & LW включают шарнирно-сочлененную конструкцию с тремя степенями свободы (3DOFS) и подъемную конструкцию колесных опор (WLLS) [25]. Конструкция 3DOFS используется для параллельного соединения передней и задней части кузова. Благодаря особенностям поворота на поясе он имеет лучшие характеристики радиуса поворота, чем у поворотного колеса поворота [26]. Оставшиеся две степени свободы могут повысить стабильность отклонения от профиля земли при пересечении транспортным средством препятствия. WLLS шасси используется для устранения препятствий; Подъем подъемного гидроцилиндра и контропора гидроцилиндра стабилизируют плоскость шасси [27].
WLLS шасси используется для устранения препятствий; Подъем подъемного гидроцилиндра и контропора гидроцилиндра стабилизируют плоскость шасси [27].
В этой статье в основном рассматривается конструкция механической конструкции и форм с тремя степенями свободы (3DOFS), определяется ее функциональность и проверяется соответствие функции критериям проектирования. В этой статье также представлена конструкция механической конструкции WLLS с переменной амплитудой. Создана математическая модель, проанализирована структурная функция, определена форма препятствия колесной опоры переменной амплитуды в различных рабочих условиях и проверена функция.Исследования, проведенные Zhu et al. представили шасси лесного препятствия, а основным компонентом препятствия является конструкция стойки колеса с изменяемой вылетом [25, 27]. По сравнению с его структурой, структура, описанная в этой статье, улучшилась по производительности и функциональности. Размер конструкции гидроцилиндра уменьшен на 10%, а высота подъема увеличена на 12,7%. Все активные части переведены на гидропривод. Это позволяет избежать сложного смешивания мощности и повышает энергоэффективность.
Все активные части переведены на гидропривод. Это позволяет избежать сложного смешивания мощности и повышает энергоэффективность.
2. Проектирование конструкции
2.1. Концептуальный дизайн транспортного средства в целом
Для преодоления пересеченной местности в лесу концепция транспортного средства была разработана, как показано на рисунке 1. Он состоит из двух рам, 3DOFS и четырех WLLS. Две рамы соединены шарнирно-сочлененной конструкцией с тремя степенями свободы. Важно отметить, что четыре задние колесные опоры с функцией подъема прикреплены к задней раме и симметрично распределены с обеих сторон. В этой конструкции ключевые конструкции кузова автомобиля включают 3DOFS и WLLS.В частности, 3DOFS способствует повышению способности преодолевать препятствия, а WLLS обеспечивает плавное преодоление препятствий.
2.2. Методы исследования основных конструкций
После использования программного обеспечения SolidWorks для трехмерного моделирования и анализа напряженно-деформированного состояния у двух ключевых структур возникли проблемы. Структуры были оптимизированы, а функции улучшены за счет изменения структуры и выбора стандартных компонентов. Конкретный метод исследования показан на рисунке 2.
Структуры были оптимизированы, а функции улучшены за счет изменения структуры и выбора стандартных компонентов. Конкретный метод исследования показан на рисунке 2.
2.3. Конструкция с тремя степенями свободы
Шарнирно-сочлененная конструкция — это механизм, который используется в инженерной машине для поворота. Из-за жесткой конструкции традиционной шарнирной конструкции, конструкция подвергается большему напряжению в процессе соединения. В лесу сложно адаптироваться к сложной местности. По вышеуказанной причине на рисунке 3 показана шарнирно-сочлененная конструкция с тремя степенями свободы, которая может катиться в трех направлениях. Эта структура представляет собой пассивный механизм, который может повысить способность адаптироваться к местности.При движении в сложных дорожных условиях он обеспечивает постоянный контакт колес с землей.
Как показано на рисунке 3, 3DOFS можно разделить на три степени свободы симметричной структуры. Первая степень свободы состоит из вращающегося штифта и передней перегородки рулевого управления для управления углом наклона передней и задней рамы при наезде на препятствие. Вторая степень свободы состоит из поворотного штифта, верхней и нижней крышек и двух гидроцилиндров для управления поворотом тали и соответствующим радиусом поворота.Третья степень свободы состоит из вращающегося штифта и рулевой перегородки для управления регулировкой угла между задней рамой и передней рамой при наезде на препятствие.
Первая степень свободы состоит из вращающегося штифта и передней перегородки рулевого управления для управления углом наклона передней и задней рамы при наезде на препятствие. Вторая степень свободы состоит из поворотного штифта, верхней и нижней крышек и двух гидроцилиндров для управления поворотом тали и соответствующим радиусом поворота.Третья степень свободы состоит из вращающегося штифта и рулевой перегородки для управления регулировкой угла между задней рамой и передней рамой при наезде на препятствие.
2.4. Функциональность конструкции с тремя степенями свободы
Первая степень свободы передней оси установлена на 30 ° на верхнем пределе и 15 ° на нижнем пределе. Это ограничение используется для уменьшения угла наклона передней и задней рамы во время пересечения препятствий и может эффективно повысить устойчивость задней рамы.Вторая степень свободы центральной оси устанавливает угол отклонения 47 ° для регулировки угла поворота. Третья степень свободы задней оси устанавливает левый и правый предельные углы на 30 °, чтобы уменьшить угол наклона передней и задней рамы, когда одна сторона преодолевает препятствие, тем самым эффективно улучшая плавность передней рамы.
2,5. Подъемная конструкция колесных опор
Колесные опоры переменной амплитуды представляют собой активные устройства, которые управляют движением с помощью верхнего и нижнего гидроцилиндров и могут реализовать два рабочих режима.Из рисунка 4 видно, что при укорочении подъемного гидроцилиндра опоры колес поднимаются, а при выдвижении опускающего гидроцилиндра опускаются опоры колес или поднимается высота шасси. Благодаря этому несвязанному движению удобнее контролировать положение колес, чтобы улучшить ходовые качества шасси [28–30].
3. Анализ движения
3.1. Конструкция с радиусом поворота
Учитывая фактическую рабочую среду и размер шасси, в промежуточном шарнирном соединении используется складывающаяся талия.Талия имеет преимущества малого радиуса поворота, плавного движения и простоты управления. По сравнению с традиционным рулевым управлением с отклоняющимся колесом, конструкция проста, а радиус поворота мал [31–33].
Как показано на рисунках 5 и 6, модель автомобиля состоит из шасси независимо разработанного размера. M 1 — расстояние между передними колесами. M 2 — расстояние между задними колесами. S — это расстояние между передними и задними колесами задней рамы. L 1 — расстояние между точкой шарнира и осью переднего колеса. L 2 — это расстояние между точкой шарнира и осью заднего колеса. θ — угол поворота. δ означает угол отклонения между двумя колесами. Радиус поворота каждого колеса следующий:
M 1 — расстояние между передними колесами. M 2 — расстояние между задними колесами. S — это расстояние между передними и задними колесами задней рамы. L 1 — расстояние между точкой шарнира и осью переднего колеса. L 2 — это расстояние между точкой шарнира и осью заднего колеса. θ — угол поворота. δ означает угол отклонения между двумя колесами. Радиус поворота каждого колеса следующий:
R 1 представляет радиус поворота переднего колеса:
R 3 представляет радиус поворота заднего колеса:
R 2 представляет радиус поворота среднего колеса., радиус поворота одноосной оси обычного трехосного вагона составляет:
По данным таблицы 1 рассчитываются радиус поворота перетяжки и радиус поворота колеса нормального прогиба. Сравнение данных показало, что радиус поворота перетяжки можно уменьшить на 15%. Формула для расчета радиуса поворота в радиусе поворота перетяжки является монотонно убывающей функцией. Следовательно, по мере дальнейшего увеличения угла поворота талии радиус поворота талии будет еще больше уменьшаться, и характеристики прохождения препятствий улучшатся.Кроме того, угол поворота рулевой колонки может продолжать увеличиваться в пределах, допускаемых конструктивными условиями.
Формула для расчета радиуса поворота в радиусе поворота перетяжки является монотонно убывающей функцией. Следовательно, по мере дальнейшего увеличения угла поворота талии радиус поворота талии будет еще больше уменьшаться, и характеристики прохождения препятствий улучшатся.Кроме того, угол поворота рулевой колонки может продолжать увеличиваться в пределах, допускаемых конструктивными условиями.
| ||||||||||||||||||||||||||||||||||||||||
 В пределах, допускаемых конструктивными условиями, больший угол поворота приводит к меньшему радиусу поворота. Регулировка угла поворота управляется гидроцилиндром. Регулировка угла поворота управляется гидроцилиндром. Поэтому гидроцилиндр с подходящим размером конструкции выбирается так, чтобы радиус поворота рулевого колеса был не менее 45 °.
В пределах, допускаемых конструктивными условиями, больший угол поворота приводит к меньшему радиусу поворота. Регулировка угла поворота управляется гидроцилиндром. Регулировка угла поворота управляется гидроцилиндром. Поэтому гидроцилиндр с подходящим размером конструкции выбирается так, чтобы радиус поворота рулевого колеса был не менее 45 °. Две формы движения опоры колеса, подъем и опускание, показаны на рисунках 8 и 9. Высота подъема и высота опускания опоры рассчитываются путем упрощения модели.
Две формы движения опоры колеса, подъем и опускание, показаны на рисунках 8 и 9. Высота подъема и высота опускания опоры рассчитываются путем упрощения модели. Таким образом, доступны следующие результаты:
Таким образом, доступны следующие результаты:
| ||||||||||||||||||||||||||||||||||||||||
 15 °
15 °В соответствии с приведенной выше формулой и данными в таблице можно рассчитать высоту подъема WLLS во время процесса подъема и высоту спуска во время процесса спуска. Из-за несвязанного движения гидроцилиндра в WLLS подъемный гидроцилиндр работает в процессе подъема, и длина опускающегося гидроцилиндра не изменяется. В процессе спуска работает только опускающийся гидроцилиндр, длина гидроцилиндра подъема не изменяется.Следовательно, вертикальное смещение центроида стойки колеса во время подъема составляет 187,6 мм, а вертикальное смещение центра тяжести стойки колеса составляет 244,4 мм во время процесса опускания.
3.3. Стратегия подъема
Согласно приведенному выше анализу можно определить диапазон изменения опоры колеса. Когда конец опоры колеса поднимается в самое верхнее положение, а конец выдвигается в самое длинное положение, наклон плоскости рабочей платформы уменьшается.![]() Такое уменьшение угла падения принесет пользу рабочей платформе во время подъема и повысит плавность хода платформы во время подъема [27].
Такое уменьшение угла падения принесет пользу рабочей платформе во время подъема и повысит плавность хода платформы во время подъема [27].
Как показано на Рисунке 10, WLLS прикреплен к испытательному стенду. Стенд представляет собой простой каркас, образованный алюминиевыми профилями. Высота рамы соответствует естественной высоте падения WLLS. Структура, показанная на рисунке, используется для анализа подъемного движения. Когда конец опоры колеса поднимается в самое верхнее положение, а конец выдвигается в самое длинное положение, путем вычисления данных наклон уклона можно уменьшить на 12.08 °. Уменьшенный угол наклона помогает рабочей платформе оставаться устойчивой при подъеме. Это означает, что наклон платформы уменьшится на 12,08 °, если шасси, оснащенное системой WLLS, используется для выполнения подъемных работ. При подъеме на склон в пределах 12,08 ° платформа всегда может быть ровной на уровне, обеспечивая стабильный подъем по платформе.
4. Создание моделирования
Для проверки достоверности и функциональности 3DOFS и WLLS в SolidWorks был создан виртуальный прототип соответствующей структуры, проведено моделирование в ADAMS и построен соответствующий многотельный анализ динамики [34, 35].
Процесс моделирования в основном включает в себя движение с одной степенью свободы, смешанное движение с двумя или двумя степенями свободы и движение с тремя степенями свободы (3DOFS) высоты подъема, наклона подъема по склону, двойного движения. колесное препятствие, и одностороннее препятствие WLLS.
4.1. Механический анализ во время работы конструкции
Во время работы 3DOFS анализ структурных сил, выполненный ANSYS, показан на рисунке 11. Сила A представляет собой естественную силу тяжести.Крутящий момент B означает крутящий момент, испытываемый первым штифтом, в основном за счет крутящего момента, создаваемого силой тяжести передней рамы. Крутящий момент C — это крутящий момент, испытываемый вторым пальцем, в основном за счет крутящего момента под действием гидроцилиндра. Крутящий момент D — это крутящий момент, воспринимаемый третьим штифтом, в основном за счет крутящего момента, создаваемого отклонением задней рамы под действием силы тяжести.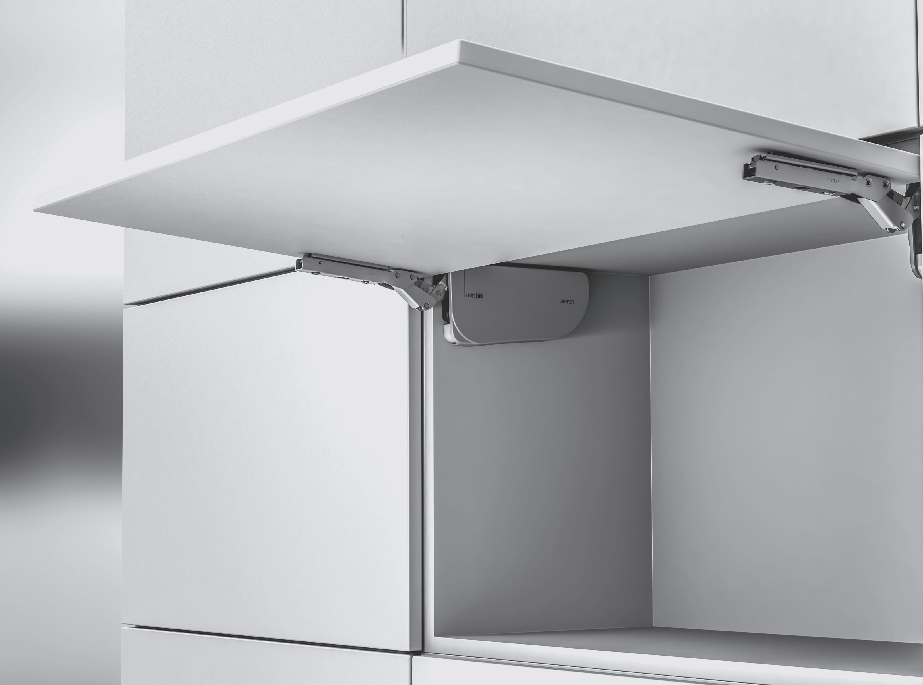 Силы E и F — это тянущие и толкающие силы, создаваемые гидроцилиндром.Под действием всех вышеуказанных сил 3DOFS совершает отклонение в трех направлениях свободы.
Силы E и F — это тянущие и толкающие силы, создаваемые гидроцилиндром.Под действием всех вышеуказанных сил 3DOFS совершает отклонение в трех направлениях свободы.
Анализ силы WLLS, выполненный ANSYS, показан на рисунке 12. Сила A представляет собой естественную силу тяжести. Сила G означает тяговое усилие, создаваемое опускающим гидроцилиндром. Сила H — это тяговое усилие, создаваемое подъемным цилиндром. Сила I — это сила реакции опоры, обеспечиваемая рамой. Крутящий момент J — это крутящий момент, обеспечиваемый гидравлическим двигателем.Под действием всех вышеперечисленных сил WLLS выполняет такие движения, как вождение и подъем колесных опор.
4.2. Моделирование движения конструкции с тремя степенями свободы
Виртуальная трехмерная модель 3DOFS создается в SolidWorks и импортируется в ADAMS, которая применяется в многотельном динамическом моделировании. Чтобы проверить характеристики движения 3DOFS, устройства движения настроены на соединение через подвижные соединения и цилиндрические соединения. Мощность приводится в действие двигателем для добавления крутящего момента. Установите базовую силу тяжести 9,8 м / с 2 . Время упражнения установлено на 10 с, а количество шагов — на 500. Основные параметры показаны в таблице 3.
Мощность приводится в действие двигателем для добавления крутящего момента. Установите базовую силу тяжести 9,8 м / с 2 . Время упражнения установлено на 10 с, а количество шагов — на 500. Основные параметры показаны в таблице 3.
| ||||||||||||||||||||||||||||||||||||||||
Для проверки Характеристики рулевого управления первой степени свободы и для фиксации других компонентов на первый рулевой вал прикладывается крутящий момент. Как показано на рисунке 13, синяя позиция представляет положение, в котором первая степень свободы стабильна. Желтое положение представляет собой крайнее верхнее положение по первой степени свободы с предельным углом 30 °. Красная позиция представляет собой нижнее предельное положение по первой степени свободы с предельным углом 15 °.
Как показано на рисунке 13, синяя позиция представляет положение, в котором первая степень свободы стабильна. Желтое положение представляет собой крайнее верхнее положение по первой степени свободы с предельным углом 30 °. Красная позиция представляет собой нижнее предельное положение по первой степени свободы с предельным углом 15 °.
Чтобы проверить характеристики рулевого управления для второй степени свободы и удерживать другие компоненты фиксированными, к гидроцилиндру рулевого управления прикладывают усилие, а ко второму валу рулевого управления прикладывают крутящий момент.Из рисунка 14 видно, что угол поворота в правом крайнем положении составляет 47 °. Угол поворота в левом крайнем положении также составляет 47 °. Требования к углу поворота выполняются с обеих сторон.
Для проверки характеристик рулевого управления для третьей степени свободы и для фиксации других компонентов к третьему рулевому валу прилагается крутящий момент. Как показано на рисунке 15, синяя позиция представляет положение, в котором третья степень свободы стабильна. Желтое положение представляет крайнее левое положение на третьей степени свободы с предельным углом 30 °.Красная позиция представляет собой правое крайнее положение при третьей степени свободы с предельным углом 30 °.
Желтое положение представляет крайнее левое положение на третьей степени свободы с предельным углом 30 °.Красная позиция представляет собой правое крайнее положение при третьей степени свободы с предельным углом 30 °.
Подтверждено, что три степени свободы работают одновременно и поддерживают соответствующие рабочие условия, и применяется соответствующая сила. После динамического моделирования 3DOFS может работать совместно или независимо, поскольку степени свободы независимы (рисунок 16).
4.3. Моделирование движения конструкции колесных опор
Виртуальная трехмерная модель WLLS создается в SolidWorks.Он импортируется в ADAMS и применяется при моделировании динамики многих тел. Основные параметры показаны в таблице 4. Шины шасси основаны на модели Fiala, а параметры показаны в таблице 5. В процессе моделирования начальная скорость WLLS составляет 2 м / с. Кроме того, в АДАМС встроено препятствие шириной 170 мм. Установите базовую силу тяжести 9,8 м / с 2 . Устанавливаются коэффициенты трения покоя и качения. По относительному размеру время моделирования составляет 15 с, а количество шагов — 2000.
Устанавливаются коэффициенты трения покоя и качения. По относительному размеру время моделирования составляет 15 с, а количество шагов — 2000.
| |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||
 1
1
 Функциональная проверка критических компонентов достигается применением соответствующих условий силы и смещения на протяжении всего процесса.
Функциональная проверка критических компонентов достигается применением соответствующих условий силы и смещения на протяжении всего процесса. На рисунке 21 показано, что при работе подъемного гидроцилиндра высота подъема WLLS составляет 187 мм, а при работе опускающегося гидроцилиндра высота падения WLLS составляет 244 мм. Результаты моделирования согласуются с теоретической моделью и соответствуют проектным требованиям.
На рисунке 21 показано, что при работе подъемного гидроцилиндра высота подъема WLLS составляет 187 мм, а при работе опускающегося гидроцилиндра высота падения WLLS составляет 244 мм. Результаты моделирования согласуются с теоретической моделью и соответствуют проектным требованиям. Когда процесс пересечения препятствий завершен, опоры колеса возвращаются в исходное положение, и процесс подъема и опускания завершается за 1 с. Доказано, что WLLS может использовать два колеса одновременно для преодоления препятствий шириной 170 мм.
Когда процесс пересечения препятствий завершен, опоры колеса возвращаются в исходное положение, и процесс подъема и опускания завершается за 1 с. Доказано, что WLLS может использовать два колеса одновременно для преодоления препятствий шириной 170 мм. В соответствии со средой моделирования устанавливается соответствующий экспериментальный процесс: (1) 3DOFS показан на рисунке 25. Эта конструкция размещается на земле и приводится в действие гидравлической станцией для проверки характеристик рулевого управления. При движении гидроцилиндров, когда длина левого гидроцилиндра достигает 570 мм, угол поворота влево достигает максимума в процессе левого поворота.Угол поворота вправо достигает максимума, когда длина правого гидроцилиндра достигает 570 мм. После нескольких перемещений и измерений максимальные углы поворота на обоих концах составили 47 °. (2) Двухколесная система препятствий WLLS показана на Рисунке 26. WLLS была прикреплена к обоим концам разработанной испытательной платформы. Установите скорость вращения гидромотора 200 об / мин. Подъем четырех гидроцилиндров и скорость вращения двух гидромоторов регулируются шестисторонним сервоклапаном.Установите высоту тестового двухколесного препятствия на 170 мм. Проверка в процессе тестирования согласуется с процессом моделирования.
В соответствии со средой моделирования устанавливается соответствующий экспериментальный процесс: (1) 3DOFS показан на рисунке 25. Эта конструкция размещается на земле и приводится в действие гидравлической станцией для проверки характеристик рулевого управления. При движении гидроцилиндров, когда длина левого гидроцилиндра достигает 570 мм, угол поворота влево достигает максимума в процессе левого поворота.Угол поворота вправо достигает максимума, когда длина правого гидроцилиндра достигает 570 мм. После нескольких перемещений и измерений максимальные углы поворота на обоих концах составили 47 °. (2) Двухколесная система препятствий WLLS показана на Рисунке 26. WLLS была прикреплена к обоим концам разработанной испытательной платформы. Установите скорость вращения гидромотора 200 об / мин. Подъем четырех гидроцилиндров и скорость вращения двух гидромоторов регулируются шестисторонним сервоклапаном.Установите высоту тестового двухколесного препятствия на 170 мм. Проверка в процессе тестирования согласуется с процессом моделирования. WLLS хорошо преодолевает 170-мм двухколесное препятствие. Регулируя ход гидроцилиндра, он может дополнительно преодолеть более высокое препятствие. (3) Как показано на Рисунке 27, WLLS был прикреплен к одной стороне разработанной испытательной платформы. Чтобы сбалансировать вес, с другой стороны испытательной платформы был добавлен весовой блок. Во время работы весовой блок может обеспечить устойчивость испытательной платформы и предотвратить ее опрокидывание.Также установите скорость вращения гидравлического двигателя на 200 об / мин. Установите высоту тестового одностороннего препятствия на 170 мм. Питание обеспечивается гидравлической станцией для перемещения всей рамы. Проверка в процессе тестирования согласуется с процессом моделирования. WLLS хорошо преодолевает одностороннее препятствие шириной 170 мм.
WLLS хорошо преодолевает 170-мм двухколесное препятствие. Регулируя ход гидроцилиндра, он может дополнительно преодолеть более высокое препятствие. (3) Как показано на Рисунке 27, WLLS был прикреплен к одной стороне разработанной испытательной платформы. Чтобы сбалансировать вес, с другой стороны испытательной платформы был добавлен весовой блок. Во время работы весовой блок может обеспечить устойчивость испытательной платформы и предотвратить ее опрокидывание.Также установите скорость вращения гидравлического двигателя на 200 об / мин. Установите высоту тестового одностороннего препятствия на 170 мм. Питание обеспечивается гидравлической станцией для перемещения всей рамы. Проверка в процессе тестирования согласуется с процессом моделирования. WLLS хорошо преодолевает одностороннее препятствие шириной 170 мм.
 (3) Определяются функциональные возможности и достижимость ключевых компонентов. Теоретическая модель компонента проверяется, гарантируя, что разработанные ключевые компоненты могут выполнять соответствующие функции, а также может быть достигнута соответствующая производительность. Результаты экспериментов показывают, что ключевые компоненты могут достигать стабильного движения, что доказывает осуществимость конструкции. (4) Рулевые и подъемные механизмы в основном применяются на шасси для лесозаготовительных работ. Рулевой механизм можно использовать в качестве промежуточной шарнирной конструкции для соединения шасси, имеющего тяговое свойство.Подъемную конструкцию можно использовать как самовыравнивающуюся конструкцию для улучшения профиля дорожного покрытия и устойчивости препятствий. В будущих лесных операциях необходимо механизировать операции и производство, чтобы заменить человеческую деятельность. Шасси лесных заграждений с рулевым и подъемным механизмом станет основной грузовой площадкой для переноски оборудования на работу.
(3) Определяются функциональные возможности и достижимость ключевых компонентов. Теоретическая модель компонента проверяется, гарантируя, что разработанные ключевые компоненты могут выполнять соответствующие функции, а также может быть достигнута соответствующая производительность. Результаты экспериментов показывают, что ключевые компоненты могут достигать стабильного движения, что доказывает осуществимость конструкции. (4) Рулевые и подъемные механизмы в основном применяются на шасси для лесозаготовительных работ. Рулевой механизм можно использовать в качестве промежуточной шарнирной конструкции для соединения шасси, имеющего тяговое свойство.Подъемную конструкцию можно использовать как самовыравнивающуюся конструкцию для улучшения профиля дорожного покрытия и устойчивости препятствий. В будущих лесных операциях необходимо механизировать операции и производство, чтобы заменить человеческую деятельность. Шасси лесных заграждений с рулевым и подъемным механизмом станет основной грузовой площадкой для переноски оборудования на работу.
 При выборе механизма
При выборе механизма В статье [2] авторы представили методику размещения крана
В статье [2] авторы представили методику размещения крана Затем авторы использовали два метода, один на основе нейронных сетей, а другой — на генетических алгоритмах
Затем авторы использовали два метода, один на основе нейронных сетей, а другой — на генетических алгоритмах В работе [7] представлена методика использования показателя объема реализованной конструкции
В работе [7] представлена методика использования показателя объема реализованной конструкции